
工業機器人的“大腦”助力智能工廠建設
發布時間:2016/7/13 10:40:21 訪問次數:1203
就如人的四肢需要大腦的指揮才能行動,工業機器人也需要大腦的指揮才能工作。而控制系統素有“工業機器人大腦”之稱,工業機器人有了控制系統才能讓自己的機械手臂正常運轉,才能實現真正的智能工廠。那么,工業機器人的控制系統究竟是怎樣的?下面,小編就化身技術達人,為大家講解一番。
http://ecdz.51dzw.com/講解之前,先來普及概念。什么是控制系統?機器人的控制系統一般都用于接收傳感器的檢測信號,并根據操作任務的要求來驅動機械臂中的各臺電動機正常運轉。就像人的活動需要依賴自身的感官一樣,機器人的運動控制離不開傳感器。機器人需要用傳感器來檢測各種狀態,其內部傳感器信號被用來反映機械臂關節的實際運動狀態,外部傳感器信號則被用來檢測工作環境的變化。而機器人的內外部傳感系統組合起來才能成一個完整的控制系統。
- 51電子網公益庫存:
- ADG417BR
- ADG417TQ
- ADG419TQ
- ADL5375-05ACP
- ADM101EARM
- ADM202EARNZ
- ADM202EARNZ-REELT
- ADM2587E
- ADM3202ARN
- ADM3251EARWZ
- ADM485EARZ
- ADP-2-1
一個完整的工業機器人運動控制系統包含四個部分:執行機構----伺服電機或步進電機;驅動機構----伺服或者步進驅動器;控制機構----運動控制器,做路徑和電機聯動的算法運算控制;控制方式----有固定執行動作方式的,那就編好固定參數的程序給運動控制器。這四個部分各司其職,才能讓機器人達到理想的運行效果。那么,機器人控制系統有哪些基本功能呢?
簡而言之,工業機器人控制系統有以下幾項基本功能:控制機械臂末端執行器的運動位置(即控制末端執行器經過的點和移動路徑);控制機械臂的運動姿態(即控制相鄰兩個活動構件的相對位置);控制運動速度(即控制末端執行器運動位置隨時間變化的規律);控制運動加速度(即控制末端執行器在運動過程中的速度變化);控制機械臂中各動力關節的輸出轉矩:(即控制對操作對象施加的作用力);具備操作方便的人機交互功能,機器人通過記憶和再現來完成規定的任務;使機器人對外部環境有檢測和感覺功能。工業機器人配備視覺、力覺、觸覺等傳感器進行測量、識別,判斷作業條件的變化。
由此來看,控制系統對于工業機器人來說可謂至關重要,控制著工業機器人運作的方方面面。而這樣的精準的控制是由哪些技術實現的呢?就小編梳理的情況來看,工業機器人控制系統的關鍵技術主要包括以下幾個:
開放性模塊化的控制系統體系結構:采用分布式cpu計算機結構,分為機器人控制器(rc),運動控制器(mc),光電隔離i/o控制板、傳感器處理板和編程示教盒等。機器人控制器(rc)和編程示教盒通過串口/can總線進行通訊。機器人控制器(rc)的主計算機完成機器人的運動規劃、插補和位置伺服以及主控邏輯、數字i/o、傳感器處理等功能,而編程示教盒完成信息的顯示和按鍵的輸入。
模塊化層次化的控制器軟件系統:軟件系統建立在基于開源的實時多任務操作系統linux上,采用分層和模塊化結構設計,以實現軟件系統的開放性。整個控制器軟件系統分為三個層次:硬件驅動層、核心層和應用層。三個層次分別面對不同的功能需求,對應不同層次的開發,系統中各個層次內部由若干個功能相對對立的模塊組成,這些功能模塊相互協作共同實現該層次所提供的功能。
機器人的故障診斷與安全維護技術:通過各種信息,對機器人故障進行診斷,并進行相應維護,是保證機器人安全性的關鍵技術。
網絡化機器人控制器技術:目前機器人的應用工程由單臺機器人工作站向機器人生產線發展,機器人控制器的聯網技術變得越來越重要。控制器上具有串口、現場總線及以太網的聯網功能。可用于機器人控制器之間和機器人控制器同上位機的通訊,便于對機器人生產線進行監控、診斷和管理。
工業機器人控制系統是機器人的大腦,是決定機器人功能和性能的主要因素。而工業機器人控制技術的主要任務就是控制工業機器人在工作空間中的運動位置、姿態和軌跡、操作順序及動作的時間等。具有編程簡單、軟件菜單操作、友好的人機交互界面、在線操作提示和使用方便等特點。
就如人的四肢需要大腦的指揮才能行動,工業機器人也需要大腦的指揮才能工作。而控制系統素有“工業機器人大腦”之稱,工業機器人有了控制系統才能讓自己的機械手臂正常運轉,才能實現真正的智能工廠。那么,工業機器人的控制系統究竟是怎樣的?下面,小編就化身技術達人,為大家講解一番。
http://ecdz.51dzw.com/講解之前,先來普及概念。什么是控制系統?機器人的控制系統一般都用于接收傳感器的檢測信號,并根據操作任務的要求來驅動機械臂中的各臺電動機正常運轉。就像人的活動需要依賴自身的感官一樣,機器人的運動控制離不開傳感器。機器人需要用傳感器來檢測各種狀態,其內部傳感器信號被用來反映機械臂關節的實際運動狀態,外部傳感器信號則被用來檢測工作環境的變化。而機器人的內外部傳感系統組合起來才能成一個完整的控制系統。
- 51電子網公益庫存:
- ADG417BR
- ADG417TQ
- ADG419TQ
- ADL5375-05ACP
- ADM101EARM
- ADM202EARNZ
- ADM202EARNZ-REELT
- ADM2587E
- ADM3202ARN
- ADM3251EARWZ
- ADM485EARZ
- ADP-2-1
一個完整的工業機器人運動控制系統包含四個部分:執行機構----伺服電機或步進電機;驅動機構----伺服或者步進驅動器;控制機構----運動控制器,做路徑和電機聯動的算法運算控制;控制方式----有固定執行動作方式的,那就編好固定參數的程序給運動控制器。這四個部分各司其職,才能讓機器人達到理想的運行效果。那么,機器人控制系統有哪些基本功能呢?
簡而言之,工業機器人控制系統有以下幾項基本功能:控制機械臂末端執行器的運動位置(即控制末端執行器經過的點和移動路徑);控制機械臂的運動姿態(即控制相鄰兩個活動構件的相對位置);控制運動速度(即控制末端執行器運動位置隨時間變化的規律);控制運動加速度(即控制末端執行器在運動過程中的速度變化);控制機械臂中各動力關節的輸出轉矩:(即控制對操作對象施加的作用力);具備操作方便的人機交互功能,機器人通過記憶和再現來完成規定的任務;使機器人對外部環境有檢測和感覺功能。工業機器人配備視覺、力覺、觸覺等傳感器進行測量、識別,判斷作業條件的變化。
由此來看,控制系統對于工業機器人來說可謂至關重要,控制著工業機器人運作的方方面面。而這樣的精準的控制是由哪些技術實現的呢?就小編梳理的情況來看,工業機器人控制系統的關鍵技術主要包括以下幾個:
開放性模塊化的控制系統體系結構:采用分布式cpu計算機結構,分為機器人控制器(rc),運動控制器(mc),光電隔離i/o控制板、傳感器處理板和編程示教盒等。機器人控制器(rc)和編程示教盒通過串口/can總線進行通訊。機器人控制器(rc)的主計算機完成機器人的運動規劃、插補和位置伺服以及主控邏輯、數字i/o、傳感器處理等功能,而編程示教盒完成信息的顯示和按鍵的輸入。
模塊化層次化的控制器軟件系統:軟件系統建立在基于開源的實時多任務操作系統linux上,采用分層和模塊化結構設計,以實現軟件系統的開放性。整個控制器軟件系統分為三個層次:硬件驅動層、核心層和應用層。三個層次分別面對不同的功能需求,對應不同層次的開發,系統中各個層次內部由若干個功能相對對立的模塊組成,這些功能模塊相互協作共同實現該層次所提供的功能。
機器人的故障診斷與安全維護技術:通過各種信息,對機器人故障進行診斷,并進行相應維護,是保證機器人安全性的關鍵技術。
網絡化機器人控制器技術:目前機器人的應用工程由單臺機器人工作站向機器人生產線發展,機器人控制器的聯網技術變得越來越重要。控制器上具有串口、現場總線及以太網的聯網功能。可用于機器人控制器之間和機器人控制器同上位機的通訊,便于對機器人生產線進行監控、診斷和管理。
工業機器人控制系統是機器人的大腦,是決定機器人功能和性能的主要因素。而工業機器人控制技術的主要任務就是控制工業機器人在工作空間中的運動位置、姿態和軌跡、操作順序及動作的時間等。具有編程簡單、軟件菜單操作、友好的人機交互界面、在線操作提示和使用方便等特點。
 相關電子資訊
相關電子資訊- 11-30OT與IT數據集成數字化建設新模式
- 11-30 TVS二極管選擇分類低壓降與保護簡述
- 11-30高性能GPU嵌入式工控機結構工作原理詳解
- 11-30新型車規級表面貼裝厚膜功率電阻器
- 11-30高壓并聯電容器的原理、特點、結構、技術參數
- 11-30繞線電阻器的特性與應用全新解析
- 11-30貼片電阻電極脫落的原因探究
- 11-30BT 模塊 SWB-A31技術參數及應用
- 11-29高性能四核應用處理器(MPU)結構技術及應用需求
- 11-29雙通道任意波形發生器系列參數封裝設計結構
- 11-29射頻隔直器的技術結構參數與應用研究
- 11-29F28P55X系列產品的特性參數及關鍵技術概述
熱門點擊
- Apple Music與Spotify競爭的短板:不能留住新用戶
- 英特爾可能獲iPhone7超半數芯片訂單 未來將高通踢出局
- 傳寶馬汽車將攜手英特爾開發無人駕駛汽車技術
- 歐盟擬第三次向谷歌發難 這次瞄準的是搜索廣告業務
- 虹膜識別還不保險?用頭蓋骨咋樣?
- IDC:平板電腦出貨量連續第六個季度出現下滑
- 智能手機企業集體尋找新方向:命運會和PC一樣嗎?
- 英飛凌拿下Cree旗下wolfspeed資產成SiC半導體霸主
- 華爾街對雅虎振興徹底失望 一致認為其核心業務將繼續惡化
- 微軟向云計算轉型代價高昂 卻是正確方向
推薦電子資訊
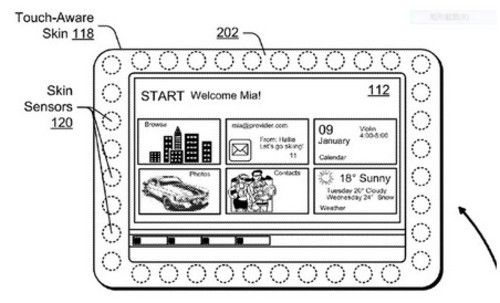
- 微軟新專利:皮膚感應邊框
- 該專利名為“基于抓握的裝置適應(Grip-Based&... [詳細]
 公網安備44030402000607
公網安備44030402000607





