
車載GSM無線通信電路設計分析
發布時間:2020/6/8 20:57:06 訪問次數:8009
該系統采用gps技術對移動目標進行實時定位,利用gsm數字移動通信網絡進行實時數據傳輸。整個系統是由gps衛星定位系統和地面移動通信系統兩大部分組成,而地面移動通信系統是由指揮監控中心、車載移動單元和gsm通信網絡三個部分組成。系統的總體結構與工作原理
該系統采用gps技術對移動目標進行實時定位,利用gsm數字移動通信網絡進行實時數據傳輸。整個系統是由gps衛星定位系統和地面移動通信系統兩大部分組成,而地面移動通信系統是由指揮監控中心、車載移動單元和gsm通信網絡三個部分組成。
車載移動單元主要組成部分的設計
車載移動單元是由主控制器cpu、gps接收機、gsm無線通信模塊、功能控制單元(手柄)和液晶顯示屏組成,其結構原理如圖1所示。

圖1 車載移動單元硬件結構原理圖
車載移動單元通過gps接收天線接收gps衛星發射的定位信號,經過cpu主控器處理,計算出車輛的日期、時間、經緯度、速度和行駛方向等定位數據。主控制器cpu是核心,處理接收機發來的定位信息,將定位信息和監控中心發來的控制信息顯示在液晶屏上,并控制gsm模塊進行短信息的收發,手柄控制單元實現遙控監聽、請求服務、中文短信息接收及通話等功能。由于gsm無線模塊和gps模塊都以串口通信方式與mcu相連,因此硬件設計較簡單,在本設計中mcu選擇華邦公司的w77e58,是因為它帶有兩個串行口能同時與gsm模塊、gps模塊進行通信,并且它的指令完全兼容mcs-51,片內有32k flash mtp rom,可編程的看門狗定時器等,采用它可以省去很多外圍元器件,提高了系統的穩定性。系統主控制器電路如圖3所示。
gsm無線通信
gps車輛定位監控管理系統的通信方式有兩種:專用無線通信網和公眾gsm網。gps/gsm車輛定位監控管理系統利用gsm短信息業務實現數據的雙向傳輸,短信息業務在移動臺和移動業務交換中心之間建立的是信令連接,具有優先權,可通率極高,誤碼率極低。這是gsm公眾網帶來的專用網和集群網無法比擬的好處。短消息用于車輛監控最大的優點在于建立連接簡單,接續快,服務費用低,這適合定時把定位信息發送到監控中心。
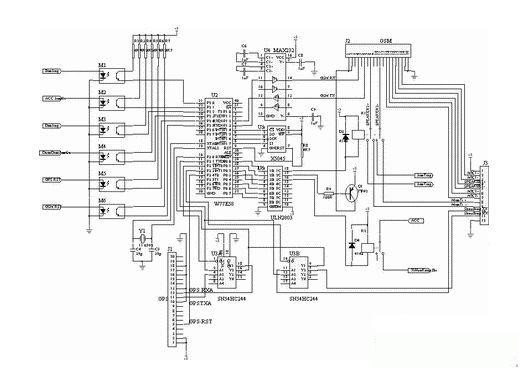
圖2 系統主控制器電路

圖3 wm01-g900/1800外圍電路設計框圖
在實際應用中,我們選用wm02-g900/1800。它的外圍電路設計框圖如圖4所示,其相關的性能指標如表1所示。它與單片機之間采用標準的串行口進行通信,通信的最高波特率可以達到 115 200b/s。gsm模塊與sim卡之間主要通過simclk和simdata信號線進行數據通信。為了保證發送短消息與短消息到達之間的時間間隔盡量短,選用的sim卡最好是同一個電信運營商提供的。在使用gprs功能時,還需要選擇支持gprs的sim卡,并開通gprs服務。該模塊還支持驅動兩路麥克風、兩路揚聲器和一路蜂鳴器。其中一路麥克風和揚聲器可以連到手柄的聽筒上,以實現車載電話功能;另一路可以實現監聽和免提功能,但這兩路不能同時工作,如果在通話中需用免提方式,可以通過at指令:at speaker=0或1進行切換。
無線數據通信電路設計
無線數據通信電路主要擔負機動車輛與固定基站系統進行近距離的無線數據交換任務。由核心芯片 nrf401及其附屬元件組成。nrf401是雙信道、高性能、低功耗的專用無線通信芯片,工作頻率為433.93/434.33mhz.工作電壓為 3.3v,最高通信速率為20kbps,可以直接與單片機串口相接,進行異步通信,實現數據發送和接收。無需對數據進行編碼。數據輸入端din與單片機的 txd端相接,數據輸出 dout端與單片機的rxd端相接。在本電路中,通信速率設計為19.2 kbps.電路原理如圖所示。

圖4 無線數據通信單元電路
gsm通信模塊電路設計
gsm通信模塊采用siemens的tc35i.tc35i是siemens公司專為gsm通信設計的專用模塊。具有語音、數據、傳真和點對點短信功能,工作于egsm 900和gsm 1800頻段,重僅10g,在3.5~4.8v范圍內均能正常t作。對at commands interface version 8.5所定義的主要指令都能很好地執行,另有擴展指令20多條。
tc35i接口由40芯電纜組成。其中1~5腳接電池的“ ”端,6~10腳接電池的“-”端,11~12腳為直流電源輸入端,可輸入 8~20v/500ma的直流電。內部有自動充電控制電路。15腳igt為模塊開機控制,31腳emergoff為關機控制,都是低電平有效,也可以通過命令實現開關機。17腳為振鈴輸出,18腳rx為串行數據輸出,19腳tx為串行數據輸入,32腳為工作狀態指示燈輸出,24~29腳接sim卡。與微處理器的接口電路如圖4所示。通信速率為19.2kbps.
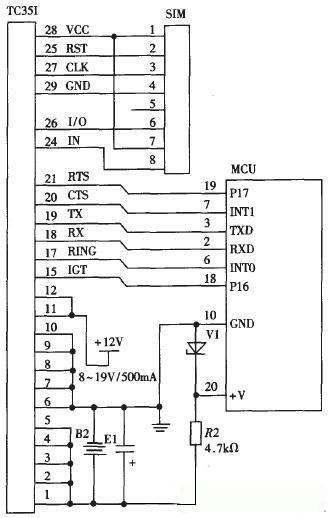
圖5 tc35i與微處理器的接口電路
tc35i的全部指令可以從siemens的網站上下載。車載用戶移動交費系統由低成本的at89c4051單片機組成,工作電源3.3v,基站由高速、高性能的77e58-40單片機完成無線數據通信與身份驗證功能。ccd車型識別由另外的獨立處理單元完成。
該系統采用gps技術對移動目標進行實時定位,利用gsm數字移動通信網絡進行實時數據傳輸。整個系統是由gps衛星定位系統和地面移動通信系統兩大部分組成,而地面移動通信系統是由指揮監控中心、車載移動單元和gsm通信網絡三個部分組成。系統的總體結構與工作原理
該系統采用gps技術對移動目標進行實時定位,利用gsm數字移動通信網絡進行實時數據傳輸。整個系統是由gps衛星定位系統和地面移動通信系統兩大部分組成,而地面移動通信系統是由指揮監控中心、車載移動單元和gsm通信網絡三個部分組成。
車載移動單元主要組成部分的設計
車載移動單元是由主控制器cpu、gps接收機、gsm無線通信模塊、功能控制單元(手柄)和液晶顯示屏組成,其結構原理如圖1所示。
圖1 車載移動單元硬件結構原理圖
車載移動單元通過gps接收天線接收gps衛星發射的定位信號,經過cpu主控器處理,計算出車輛的日期、時間、經緯度、速度和行駛方向等定位數據。主控制器cpu是核心,處理接收機發來的定位信息,將定位信息和監控中心發來的控制信息顯示在液晶屏上,并控制gsm模塊進行短信息的收發,手柄控制單元實現遙控監聽、請求服務、中文短信息接收及通話等功能。由于gsm無線模塊和gps模塊都以串口通信方式與mcu相連,因此硬件設計較簡單,在本設計中mcu選擇華邦公司的w77e58,是因為它帶有兩個串行口能同時與gsm模塊、gps模塊進行通信,并且它的指令完全兼容mcs-51,片內有32k flash mtp rom,可編程的看門狗定時器等,采用它可以省去很多外圍元器件,提高了系統的穩定性。系統主控制器電路如圖3所示。
gsm無線通信
gps車輛定位監控管理系統的通信方式有兩種:專用無線通信網和公眾gsm網。gps/gsm車輛定位監控管理系統利用gsm短信息業務實現數據的雙向傳輸,短信息業務在移動臺和移動業務交換中心之間建立的是信令連接,具有優先權,可通率極高,誤碼率極低。這是gsm公眾網帶來的專用網和集群網無法比擬的好處。短消息用于車輛監控最大的優點在于建立連接簡單,接續快,服務費用低,這適合定時把定位信息發送到監控中心。
圖2 系統主控制器電路
圖3 wm01-g900/1800外圍電路設計框圖
在實際應用中,我們選用wm02-g900/1800。它的外圍電路設計框圖如圖4所示,其相關的性能指標如表1所示。它與單片機之間采用標準的串行口進行通信,通信的最高波特率可以達到 115 200b/s。gsm模塊與sim卡之間主要通過simclk和simdata信號線進行數據通信。為了保證發送短消息與短消息到達之間的時間間隔盡量短,選用的sim卡最好是同一個電信運營商提供的。在使用gprs功能時,還需要選擇支持gprs的sim卡,并開通gprs服務。該模塊還支持驅動兩路麥克風、兩路揚聲器和一路蜂鳴器。其中一路麥克風和揚聲器可以連到手柄的聽筒上,以實現車載電話功能;另一路可以實現監聽和免提功能,但這兩路不能同時工作,如果在通話中需用免提方式,可以通過at指令:at speaker=0或1進行切換。
無線數據通信電路設計
無線數據通信電路主要擔負機動車輛與固定基站系統進行近距離的無線數據交換任務。由核心芯片 nrf401及其附屬元件組成。nrf401是雙信道、高性能、低功耗的專用無線通信芯片,工作頻率為433.93/434.33mhz.工作電壓為 3.3v,最高通信速率為20kbps,可以直接與單片機串口相接,進行異步通信,實現數據發送和接收。無需對數據進行編碼。數據輸入端din與單片機的 txd端相接,數據輸出 dout端與單片機的rxd端相接。在本電路中,通信速率設計為19.2 kbps.電路原理如圖所示。
圖4 無線數據通信單元電路
gsm通信模塊電路設計
gsm通信模塊采用siemens的tc35i.tc35i是siemens公司專為gsm通信設計的專用模塊。具有語音、數據、傳真和點對點短信功能,工作于egsm 900和gsm 1800頻段,重僅10g,在3.5~4.8v范圍內均能正常t作。對at commands interface version 8.5所定義的主要指令都能很好地執行,另有擴展指令20多條。
tc35i接口由40芯電纜組成。其中1~5腳接電池的“ ”端,6~10腳接電池的“-”端,11~12腳為直流電源輸入端,可輸入 8~20v/500ma的直流電。內部有自動充電控制電路。15腳igt為模塊開機控制,31腳emergoff為關機控制,都是低電平有效,也可以通過命令實現開關機。17腳為振鈴輸出,18腳rx為串行數據輸出,19腳tx為串行數據輸入,32腳為工作狀態指示燈輸出,24~29腳接sim卡。與微處理器的接口電路如圖4所示。通信速率為19.2kbps.
圖5 tc35i與微處理器的接口電路
tc35i的全部指令可以從siemens的網站上下載。車載用戶移動交費系統由低成本的at89c4051單片機組成,工作電源3.3v,基站由高速、高性能的77e58-40單片機完成無線數據通信與身份驗證功能。ccd車型識別由另外的獨立處理單元完成。
 相關電子資訊
相關電子資訊- 11-30OT與IT數據集成數字化建設新模式
- 11-30 TVS二極管選擇分類低壓降與保護簡述
- 11-30高性能GPU嵌入式工控機結構工作原理詳解
- 11-30新型車規級表面貼裝厚膜功率電阻器
- 11-30高壓并聯電容器的原理、特點、結構、技術參數
- 11-30繞線電阻器的特性與應用全新解析
- 11-30貼片電阻電極脫落的原因探究
- 11-30BT 模塊 SWB-A31技術參數及應用
- 11-29高性能四核應用處理器(MPU)結構技術及應用需求
- 11-29雙通道任意波形發生器系列參數封裝設計結構
- 11-29射頻隔直器的技術結構參數與應用研究
- 11-29F28P55X系列產品的特性參數及關鍵技術概述
 公網安備44030402000607
公網安備44030402000607





