深圳市哲瀚電子科技有限公司 聯系人:陳小姐 手機1371444197電話:0755-83259945 QQ:3529086935
深圳哲瀚電子優勢供應BPS晶豐明源系列:BP1360BP3106 BP2832A BP2832AJ BP2831A BP2831AJ BP2329ABP2329AJBP2857D BP2836D BP3316D BP1808 BP3309 BP3319 BP3315 BP9918BBP9918CBP3126 BP3216等更多型號,歡迎來電咨詢0755-83224649陳小姐/QQ3012323310
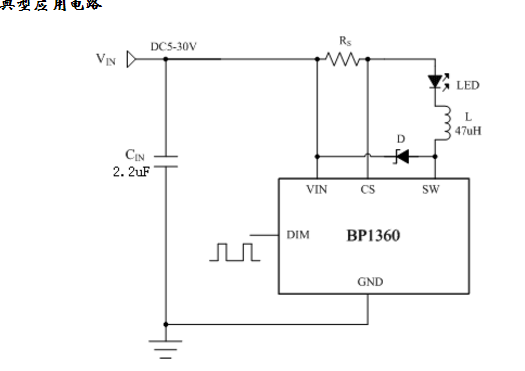
BP1360是一款驅動高亮度LED的降壓恒流驅動芯片,BP1360外部采用極少的元器件,為MR16 LED燈杯、LED舞臺燈、車載LED燈、太陽能LED燈和LED路燈提供一個極高性價比的解決方案。BP1360輸入電壓范圍從5伏到30伏,輸出電流通過采樣電阻設定,單顆LED最大輸出電流可達500毫安。BP1360采用專利技術的恒流控制方法使得LED電流精度高達±3%。BP1360通過DIM引腳接受0.5-2.5V的模擬調光以及頻率范圍很寬的PWM調 光。當DIM的電壓低于0.3V時,功率開關關斷, BP1360進入極低工作電流的待機狀態。
BP1360內置功率開關,根據不同的輸入電壓, BP1360可以驅動多顆1瓦或2瓦的LED。 BP1360包含過溫保護、LED短路和開路保護功能。
BP1360采用體積很小SOT23-5封裝。

特點:
1. 極少的外部元器件
2.很寬的輸入電壓范圍:從5V到30V
3.±3%的輸出電流精度
4.LED開路保護
5.LED短路保護
6.過溫保護
7.最大輸出500mA的電流
8.復用DIM引腳進行LED模擬調光和PWM調光
9.高達97%的效率
10.輸出可調的恒流控制方法
1.MR16/11 LED射燈代替鹵素燈
2.車載LED燈
3.LED舞臺燈
4.太陽能LED燈
5. LED信號燈
當人工智能可以幫助人類承擔一些工作時,我們總是把雙方的職責劃分的很清楚。人類工作時,很少看到人工智能的主動參與,人工智能做事時,人類更是完全不插手。
這一點最明顯的體現就在于輔助駕駛上,人類駕駛時輔助駕駛頂多會通過燈光閃爍、方向盤震動來提示人類駕駛環境的變化,而不會主動去掌握主動權,影響汽車行動的方向和速度。在輔助駕駛自動泊車時,也會讓人類雙手離開方向盤。
其中的原因或許是人類的行為實在太千差萬別,如果引入智能解決方案之中會加更多的計算量。想象一下,在自動泊車時人工智能認為一個車位要倒兩把才能進去,人類老司機卻認為倒一把就能進去,這種對問題解決方式設定的不同會讓雙方根本無法合作。
可如果人類可以在各個領域人工智能親密合作,會是怎樣一種景象?
從復制雙手到復制思想:人類和人工智能的合作史
關于人機合作這件事,我們已經歷經了很多年的研究,雙方合作的模式可以被分為三種類型。
第一類合作模式是主從操縱。
在40年代,人類為了研究不宜人體接觸的放射性物質,研發出了一種主從機械手對其進行遠程操控。從機械手(或機器人)負責在不適宜人類前往的地方工作,通過傳感系統收集和傳達信息,而人類負責控制主機械手,將動作映射到從機械手上,就形成了完美的遠程操作。
如今這種方式已經應用在很多地方,水下機器人、手術機器人等等都是這種人機合作的成果。
blob.png
可這樣的操作方式有著很多不便,比如動作映射之間會有一定的誤差,從機器人傳感器收集來的信息也可能有一定的延遲,最后就會導致操作的低效。
于是出現了第二種人機合作模式——協作智能。
這種合作模式是讓人和自動化的智能體一起協作,先讓智能體預測人的目標,再來協助人實現這一目標。就拿簡單的分揀動作來說,一張桌子上放置著不同形狀的物體,人類向正方體的方向伸出手,機械手就分揀出了所有的正方體。讀懂人類的目標并完成目標,這就是典型的協作智能。
可這種模式的問題在于,人類在工作時的想法往往是多變的——那些目標流程單一,可以被套路化的工作早就被自動化了,也用不上協作智能。那些可以從多種途徑實現的工作,卻需要對智能體進行大量訓練才能使其讀懂人類每一個動作的意圖,于是協作智能在應用上也遲遲沒有什么進展。
第三種合作模式則是目前熱度很高的腦機接口 ,通過對腦電信號的讀取和解碼實現對器械的操控。這樣的方式雖然已經和“讀懂人類意圖,協助實現目標”非常接近。
但對于腦機接口我們此前也有過很多介紹,由于捕捉腦電信號十分困難,現在我們至多可以利用腦機接口完成一些非常簡單的動作,距離提升生產力效率還很遙遠。
人工智能+人類,可不可能比人工智能更強?
這樣看來,第二種協作智能的模式更接近我們理想中的人機合作模式:智能體通過人類動作、操作信號等等更明確同時也更容易理解的信息判斷人類目標,同時擁有一定的自主性,不至于事事都讓人類親手教學。
最近伯克利的人工智能研究院推出了一篇論文,顯示了如何利用深度強化學習來增強協作智能的效果。
簡單來說就是讓智能體和阿爾法狗一樣,把人類的動作當做“棋譜”大量輸入給神經網絡,讓神經網絡自行挖掘動作和實現目標之間的關系。在訓練時,為神經網絡加入獎懲機制,每一次當智能體幫助人類更接近一步目標時,智能體就會獲得獎勵,從而促使智能體越來越接近正確的合作模式。
在研究院的實驗中,相比直接告訴智能體目標,讓其自己尋找解決方案,這種讓智能體分辨人類目標,和人類一起尋找解決方案的方式,訓練時間會大大縮短,并且幫助人類完成自己無法完成的事情。
舉例來講,研究員們測試了一款Lunar Lander的游戲,游戲目標是操縱一輛從天而降左右搖晃的小車,使其降落在兩只旗幟中間。人類用鍵盤進行這項游戲時很大幾率會以失敗告終,讓人工智能沖著目標獨自摸索更是需要無窮盡的訓練。但當人類和人工智能合作時,僅需一段時間的訓練,人工智能就可以幫助人類以各種姿勢實現目標了。
讓人工智能坐上副駕駛,一起探索未知
協作智能給了我們一個提示:當世界上出現人類和人工智能都無法單獨完成的工作時,我們應該怎么辦?
這樣的問題絕對是大范圍存在的,就像阿爾法元經過自我對弈進行訓練,打敗了用人類棋譜訓練出的阿爾法狗一樣。很多時候我們自以為找到了最好的解決方案,只需悉數傳授給人工智能時,卻未曾想過這可能是一種自大。尤其在物理世界,人工智能無法像解決圍棋的數學問題一樣自己尋找解法。這時人類和人工智能的親密合作,或許才是最高效的解決方案。
可以應用到協作智能的場景很多,比如在伯克利人工智能研究院的測試中,用降落無人機到指定地點為標準,人類獨自操作的速度、精準度都要遠遠落后于于智能協作操作的速度和精準度。人工智能就好像是人類的副駕駛,以另一種視角幫助人類更好的達成目標。
blob.png
換句話說,我們對輔助駕駛系統的種種不滿,或許都能用這種方式解決。例如自動泊車不再僅僅限于奢侈的大車位,人類或許可以和人工智能一起嘗試在小車位中上演極限操作。不僅僅輔助駕駛,無人機操縱、工業自動化……人類和人工智能的一切工作都可以通過這種方式達到更強的成果。
當然,協作智能也并非是完全的解決方案。最典型的問題是其訓練數據來自于人類與人工智能的協作操作,很難獲得現成的數據只能親手制造,所以對于駕駛、工業操作等等物理世界中的項目,需要耗費極大的人力去訓練人工智能。
但我們相信這些問題總會被一一解決,更重要的是我們要知道人類和人工智能是互相需要的。創造出一種技術僅僅為了使其替代自己,完成已知的工作是一種懶惰和愚蠢,雙方協作創造更多未知,才是技術真正的價值所在。
公司:深圳市哲瀚電子科技有限公司
聯系人:陳小姐
手機:13714441972
電話:0755-82549527/83259945/13714441972
傳真:0755-83259945
地址:廣東省深圳市福田區中航路都會軒1213