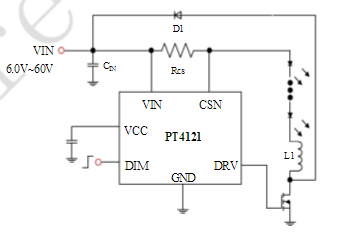
PT4121是一款工作在連續電感電流導通模式的降壓型恒流控制器,用于驅動一顆或多顆串聯LED。
PT4121輸入電壓范圍從6V到60V,輸出電流可調。 PT4121采用高端電流采樣設置LED平均電流,并通過DIM引腳可以接受模擬調光和很寬范圍的PWM調光。當DIM的電壓低于0.3伏時,PT4121關斷功率開關,進入極低工作電流的待機狀態。PT4121采用SOT23-6封裝。

特點:
極少的外部元器件
很寬的輸入電壓范圍:6V到60V
高達97%的效率
復用DIM引腳進行LED開關、模擬調光和PWM調光
可達1MHz開關頻率
輸出可調的恒流控制方法
3%的輸出電流精度
高端電流采樣
無需補償的遲滯控制方式
RCS開路保護
LED開路/短路保護
熱關斷功能
應用:
低壓LED射燈代替鹵素燈
車載LED燈
LED備用燈、應急燈、標志燈
LED信號燈
液晶電視背光
對于下一代機器人的發展而言,控制和通訊IC扮演重要的角色。 然而,許多全新、小型和低成本感測技術的出現及融合,才是這些現代及復雜機器人的心臟。
要實現下一代機器人,有數種關鍵傳感器技術發揮極重要的作用,包括磁位置傳感器、存在傳感器、手勢傳感器、力矩傳感器、環境傳感器及電源管理傳感器等。
磁位置傳感器促機器人革命
在當今的消費性、服務專業、社交,甚至工業機器人中最常見的傳感器技術之一,就是磁位置傳感器集成電路(IC)。 今天,幾乎消費性、服務專業或社交機器人的每個關節都使用兩個或更多的磁位置傳感器IC。 每個移動軸或關節旋轉都使用至少一個磁角位置傳感器。 今日許多機器人采用小型卻強大的無刷直流馬達(BLDC)來移動機器人的關節和四肢。 為了正確驅動馬達,就需要馬達位置回饋。
有愈來愈多的磁角位置傳感器IC被用來為關節馬達控制器提供馬達換向回饋(見圖1)。 此外,機器人關節的封閉回路馬達控制也需要齒輪角度位置回饋。 因此,機器人關節的每個運動軸都需要兩個磁角位置傳感器。 例如,若機器人腳踝須以俯仰和滾動方式進行軸向運動,則總共須使用四個磁位置傳感器。 由于每一個關節都需要這種倍數的傳感器,且大部份機器人都有許多關節,因此,非常明顯地,現今新一代機器人已大量采用磁角位置傳感器。

圖1 具有磁位置測器的機器手臂
相較于過往被用在機器人關節中的其他位置傳感器技術,今日最新的磁角位置傳感器提供了許多好處。 這些新型磁角位置傳感器IC提供高分辨率和可重復的精確度。 另外,由于它們是以CMOS硅制程制造,因此與其他位置傳感器技術,例如光學編碼器和旋轉變壓器相較時,這些新型磁角位置傳感器IC需要極小的功率、重量和空間。 再者,磁位置傳感器IC可以在非常惡劣的環境中工作,包括極端溫度、骯臟和多塵的環境。 一些磁位置傳感器,甚至不受在機器人工作環境中常見磁雜散場的影響。 最后,由于它們是非接觸式,并且沒有移動的機械零件,因此不會磨損,不同于低成本社交/玩具機器人使用的傳統伺服馬達組件中常見的電阻電位計。 拜這些既有優勢所賜,磁角位置傳感器被廣泛用于現今的消費性、專業服務和社交機器人,現在甚至是用于工業機器人。
信息融合實現空間視覺感測
目前有數種存在傳感器技術正被整合至當今的機器人中,且它們的信息被融合在一起,用于提供機器人的空間視覺感測,以及物體偵測和躲避障礙等。 二維和三維視覺立體相機在當今許多新型消費性和專業服務機器人中都很常見。 不過,一些新型先進傳感器技術,例如包括光檢測和測距光達(Lidar)傳感器在內的飛時測距(Time of Flight)傳感器等,也日漸被用于機器人中。 光達提供機器人運行空間和周圍環境的高分辨率三維測繪(3D Mapping),使其能更佳地執行任務和移動(見圖2)。

圖2 光達測繪(Lidar Mapping)
超音波傳感器也被用于存在感測。 就像是用于倒車安全警報系統中一樣,機器人中的超音波傳感器也適用于偵測附近的障礙物,以防止機器人撞到墻壁、物體、其他機器人和人體。 另外,在機器人執行其主要功能時,這些超音波傳感器也能發揮作用。 超音波傳感器在近場導航和障礙避免中扮演重要角色,可提升機器人的整體效能和安全性。
然而,超音波傳感器的感測范圍有其限制,大約是1公分到數公尺的距離,以及最大約30度的錐體范圍內。 它們的成本相對較低,且在近距離范圍內的精度較高,但是隨著測距范圍和測量角度的增加,精度會隨之下降。 它們也容易受到溫度和壓力變化的影響,以及來自其他使用同樣頻率超音波傳感器的機器人的干擾。 不過當與其他存在傳感器組合使用時,它們能提供有用和可靠的位置信息。
當所有存在傳感器(2D/3D相機、光達和超音波)的數據融合在一起之后,正如我們開始在高階消費性/專業服務機器人及工業機器人上看到的,這些機器人擁有杰出的空間察覺能力,且能在不傷害自己、 人類及環境的情況下移動并執行更復雜的任務。
手勢傳感器助人機互動
有愈來愈多的手勢傳感器被整合至現今最復雜的機器人中,以提供用戶接口指令。 手勢傳感器技術包括機器人操作員穿戴的光學傳感器和控制臂帶傳感器等。
使用基于光學的手勢傳感器,可以訓練機器人識別特定的手部運動,并且執行基于特定手勢或手部動作的特定任務。 這些類型的傳感器在家庭或醫院中為溝通能力受限的身障者開啟了許多機會,在智能工廠中也提供許多協助。
使用臂帶控制傳感器,佩戴者可以與協作、工業、醫療或軍事機器人溝通并進行控制,使機器人能根據操作者的移動方式和手臂姿勢來執行及仿真特定任務。 例如,雙臂各穿戴一個臂帶傳感器的外科醫生,可以控制遠程醫療機器人手臂來執行手術,而這雙手臂可能遠在地球的另一側。
力矩傳感器提供監測功能
力矩傳感器也愈來愈多地被用在今日的下一代機器人中。 力矩傳感器不僅被用于機器人的末端操縱裝置和夾具,而且還用于機器人的其他部分,例如軀干、手臂、腿和頭部等。 這些特殊的力矩傳感器被用于監測肢體快速運動、偵測障礙物并向機器人的中央處理器提供安全警示。 例如,當機器手臂中的力矩傳感器感測到機器手臂因碰撞到物體而出現突然及意外的外力時,其控制安全軟件能使手臂停止動作并縮回其位置。
力矩傳感器也能與存在傳感器,以及其他安全監控傳感器,例如環境傳感器共同運作,為整體安全區域提供監控功能。
環境傳感器護工作安全
各種環境傳感器也正在找尋它們進入工業和消費性機器人的方式,包括能偵測攸關空氣質量的揮發性有機化合物(Volatile Organic Compounds, VOCs)的環境傳感器、溫度和濕度傳感器、壓力傳感器, 甚至是能偵測照明有無的傳感器。 這些傳感器不僅有助于確保機器人能夠持續有效且安全地運行,還能讓機器人工作范圍內的人員察覺到不安全的環境情況。
電源管理傳感器提高效率
電源管理傳感器也被整合至現今的自動機器人中,以幫助延長機器人在兩次充電間的工作時間,并確保目前自動機器人中最常采用的鋰離子電池在充電或放電時不會過熱。 電源管理傳感器也用于穩壓,以及機器人關節馬達的電源和散熱管理。 所有的機載電子零件,像是微處理器、傳感器和致動器等,都需要低噪聲漣波電源和穩壓,以確保其能高效率且正確地運作。
用于機器人電源管理的最新傳感器解決方案,包括用于電池放電和充電的庫侖計數、精確可靠用于穩壓器的過熱監控傳感器,以及電池管理裝置的電流傳感器。
拜這些創新傳感器技術的整合和融合所賜,今日最新的機器人可以更獨立及安全地運作。 此外,運算能力、軟件和人工智能的大幅進展,以及與這些新型傳感器技術的搭配,使得下一代機器人可以更容易地被用來支持各種應用。 再者,比起前一代機器人,它們可以更精確、更迅速地完成任務。 最后,它們可以在更多樣的家庭、商業和制造環境中更獨立地工作,且更安全地與人類協作。
公司:深圳市哲瀚電子科技有限公司
聯系人:陳小姐
手機:13714441972
電話:0755-82549527/83259945/13714441972
傳真:0755-83259945
地址:廣東省深圳市福田區中航路都會軒1213