
RT9261-41PX聲輪電渦流轉速計
發布時間:2019/11/4 19:15:42 訪問次數:977
RT9261-41PX由圖9-76可見,每一個轉速探頭有二塊永久磁鐵和三個磁極組成,在中間磁極上套一個輸出線圈,構成一個永磁電壓脈沖發生器。在結構上使得相鄰磁極之間的距離正好等于聲輪(齒輪)的齒距。永久磁鐵所產生的磁通通過聲輪構成閉合的磁路。整個探頭封裝在聚酰亞胺固化的玻璃纖維(絕熱絕緣材料)模制件里面。
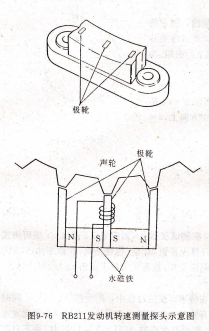
極靴聲輪安裝在壓氣機的旋轉軸上并隨軸一起旋轉。當聲輪的齒正好轉到與磁極對準時,磁極與聲輪之間的氣隙最小,磁路的磁阻最小,使得通過線圈的磁通最大;當聲輪的齒轉到兩磁極之間時,磁極與聲輪之間的氣隙最大,磁路的磁阻也最大,使得通過氣隙的磁通最小。隨著聲輪的旋轉,通過線圈的磁通不斷在最大值和最小值之間交替變化。于是線圈兩端便不斷地輸出電壓脈沖。脈沖的頻率等于聲輪的齒轉過磁極的速度,即正比于在軸上安裝聲輪的壓氣機的轉速。
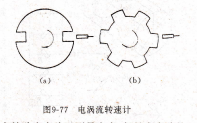
聲輪電渦流轉速計,RB211發動機轉速測量探頭示意圖,在旋轉體上加工或加裝一個如圖9-77所示的形狀的金屬體,旁邊安裝一個電渦流傳感器。當旋轉體旋轉時,由于傳感器線圈與導體平面之間間隙不斷變化,引起渦流效應的變化。從而導致線圈電感、阻抗和品質因數周期地變化,由此引起傳感器的輸出信號(電壓信號)周期性地變化。再將輸出電壓經放大整形后接入頻率計,指示出脈沖數。該脈沖數與轉速有關,可按下式應變式扭矩傳感器計算:
n=f/n*60 (9-43)
式中 r一脈沖頻率(Hz);
Ⅳ―旋轉金屬體的齒槽數或齒數;
m―轉速(r/min)。
成45°方向貼。
根據材料力學知道,受到純扭的軸的橫截面上最大剪應力rmax與軸上扭矩的關系為
rmax=mk/wp (9-44)
式中,Mk是作用于軸上的扭矩,Wp是軸截面的抗扭模數(對于實心軸wp=0.2d3對于空心軸wp=0.2D3(1一d4/d4羅),其中・為軸的外徑,d為軸的內徑)。
最大剪應力rmax是不能用應變片進行測量的,但它的數值等于主應力。主應力方向與軸線成45°角,通過應變片測主應力可獲得最大剪應力,這樣就得到了軸上的扭矩。為此,有下列關系,即
σ1=一σ3=rmax=Mk/Typ (9-45)
從圖9-78可以看出,在莫爾圖上,R1方向應為十ε,R2方向應為一ε。在沿軸線的0°和垂直于軸線的90°方向上,ε=0。
根據虎克定律
ε1=σ1 /e
又因為σ1=-σ3,故
q=t+u=(1+ui)

莫爾圖所以,在測試儀器上(如應變儀)讀出q,便可由式(9-46)算出扭矩Mk值。也就是說,在給定軸45°方向上粘貼應變片,從測試儀器上讀出e45。,就可求得Mk的大小。
在傳感器使用過程中,除受扭矩作用外,同時還受有軸向力和彎矩,應變片的電阻也會因此發生變化,因而產生誤差。所以在實際應用中,并不只是單在傳感器軸的一邊與軸成45°方向貼應變片。為避免誤差和增加靈敏度,實際貼片方式如圖9-79所示。
R1、R2、R3、R4構成如圖9-79所示的全橋,且u1,u2與R3、R4在位置上完全對稱。這樣,可以消除軸向力和彎矩的影響。

當應變片不是直接貼在作用有扭矩的軸上,而是通過傳感器來測扭矩時,則需設計傳感器的彈性敏感元件。設計方法可參考有關資料,這里不贅述。
RT9261-41由圖9-76可見,每一個轉速探頭有二塊永久磁鐵和三個磁極組成,在中間磁極上套一個輸出線圈,構成一個永磁電壓脈沖發生器。在結構上使得相鄰磁極之間的距離正好等于聲輪(齒輪)的齒距。永久磁鐵所產生的磁通通過聲輪構成閉合的磁路。整個探頭封裝在聚酰亞胺固化的玻璃纖維(絕熱絕緣材料)模制件里面。
極靴聲輪安裝在壓氣機的旋轉軸上并隨軸一起旋轉。當聲輪的齒正好轉到與磁極對準時,磁極與聲輪之間的氣隙最小,磁路的磁阻最小,使得通過線圈的磁通最大;當聲輪的齒轉到兩磁極之間時,磁極與聲輪之間的氣隙最大,磁路的磁阻也最大,使得通過氣隙的磁通最小。隨著聲輪的旋轉,通過線圈的磁通不斷在最大值和最小值之間交替變化。于是線圈兩端便不斷地輸出電壓脈沖。脈沖的頻率等于聲輪的齒轉過磁極的速度,即正比于在軸上安裝聲輪的壓氣機的轉速。
聲輪電渦流轉速計,RB211發動機轉速測量探頭示意圖,在旋轉體上加工或加裝一個如圖9-77所示的形狀的金屬體,旁邊安裝一個電渦流傳感器。當旋轉體旋轉時,由于傳感器線圈與導體平面之間間隙不斷變化,引起渦流效應的變化。從而導致線圈電感、阻抗和品質因數周期地變化,由此引起傳感器的輸出信號(電壓信號)周期性地變化。再將輸出電壓經放大整形后接入頻率計,指示出脈沖數。該脈沖數與轉速有關,可按下式應變式扭矩傳感器計算:
n=f/n*60 (9-43)
式中 r一脈沖頻率(Hz);
Ⅳ―旋轉金屬體的齒槽數或齒數;
m―轉速(r/min)。
成45°方向貼。
根據材料力學知道,受到純扭的軸的橫截面上最大剪應力rmax與軸上扭矩的關系為
rmax=mk/wp (9-44)
式中,Mk是作用于軸上的扭矩,Wp是軸截面的抗扭模數(對于實心軸wp=0.2d3對于空心軸wp=0.2D3(1一d4/d4羅),其中・為軸的外徑,d為軸的內徑)。
最大剪應力rmax是不能用應變片進行測量的,但它的數值等于主應力。主應力方向與軸線成45°角,通過應變片測主應力可獲得最大剪應力,這樣就得到了軸上的扭矩。為此,有下列關系,即
σ1=一σ3=rmax=Mk/Typ (9-45)
從圖9-78可以看出,在莫爾圖上,R1方向應為十ε,R2方向應為一ε。在沿軸線的0°和垂直于軸線的90°方向上,ε=0。
根據虎克定律
ε1=σ1 /e
又因為σ1=-σ3,故
q=t+u=(1+ui)
莫爾圖所以,在測試儀器上(如應變儀)讀出q,便可由式(9-46)算出扭矩Mk值。也就是說,在給定軸45°方向上粘貼應變片,從測試儀器上讀出e45。,就可求得Mk的大小。
在傳感器使用過程中,除受扭矩作用外,同時還受有軸向力和彎矩,應變片的電阻也會因此發生變化,因而產生誤差。所以在實際應用中,并不只是單在傳感器軸的一邊與軸成45°方向貼應變片。為避免誤差和增加靈敏度,實際貼片方式如圖9-79所示。
R1、R2、R3、R4構成如圖9-79所示的全橋,且u1,u2與R3、R4在位置上完全對稱。這樣,可以消除軸向力和彎矩的影響。
當應變片不是直接貼在作用有扭矩的軸上,而是通過傳感器來測扭矩時,則需設計傳感器的彈性敏感元件。設計方法可參考有關資料,這里不贅述。
 相關技術資料
相關技術資料- 11-30iCAN-4017 AI功能模塊工作原理與應用解析
- 11-30創新性和前瞻性模擬和混合信號平臺Treo
- 11-30示波器探頭常見類型及使用技巧
- 11-30高端邏輯芯片新CoWoS封裝技術
- 11-30汽車電子半導體器件市場發展前景分析
- 11-30全球汽車微控制器(MCU)市場需求及發展趨勢
- 11-29一文解讀多光譜CIS解決方案
- 11-29全新5G Redcap芯片平臺系列應用設計參數
- 11-2910納米第6代(1c)DRAM系列技術應用介紹
- 11-2916通道高精度定時器(HRTimer)研究
- 11-29第四代低功耗藍牙芯片KW 47應用
- 11-29藍牙信道探測(Channel Sounding)
 公網安備44030402000607
公網安備44030402000607





