
步進電機及驅動電路
發布時間:2011/8/15 9:53:35 訪問次數:9319
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元器件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。這一線性關系的存在,加上步進電機只有周期性的單步誤差和累積誤差等特點,使步進電機廣泛用于需要角度轉動精確計量等領域。例如,機器人手臂的運動、高級字輪的字符選擇、計算機驅動器的磁頭控制、打印機的字頭控制等,都要用到步進電機。由于輸入的是脈沖信號,輸出的角位移是斷續的,所以又稱為脈沖電機。步進電機種類很多,按結構可分為反應武、永磁式和混合式步進電機3種;按相數分則可分為單相、兩相和多相3種。步進電機只有在通電的情況下,才具備自我保持力:在停電的情況下,自我保持力消失。
7.3.1步進電機的構造
步進電機的轉子為多極分布,定子上嵌有多相星形連接的控制繞組,由專門電源輸入電脈沖信號,每輸入一個脈沖信號,步進電機的轉子就旋轉一步。步進電機的構造(以五相步進為例)如圖7-8所示,分為定子與轉子兩部分。
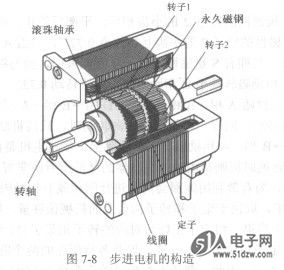
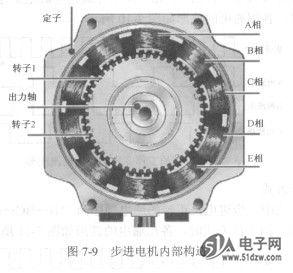
轉子由轉子1、轉子2、永久磁鋼等3部分構成。而且轉子朝軸方向已經磁化,轉子1為N極時,轉子2則為S極。定子擁有10個小齒狀的磁極,每對磁極均繞有線圈。其線圈對角位置的磁極相互連接,電流流通后,線圈就會被磁化成同一極性。對角線的2個磁極形成一相,因此具有A相至E相5個相位,所以稱為五相步進電機,如圖7-9所示。轉子的外圈由50小齒構成,轉子l和轉子2的小齒在構造上互相錯開1/2螺距。由此轉予形成了100個小齒,小齒對數越多,其步進精度越高。
7.3.2步進電機運轉原理
給處于錯齒狀態的相通電勵磁,則轉子在電磁力的作用下,將向磁導率最大(或磁阻最小)的位置轉動。A相勵磁時,會使磁極磁化成S極,與帶有N極磁性的轉子1的小齒互相吸引,并與帶有S極磁性的轉子2的小齒相斥,平衡后停止。此時,沒有勵磁的B相磁極的小齒和帶有S極磁性的轉子2的小齒互相偏離0.72。。當由A相勵磁轉為B相勵磁時,B相磁極磁化成N極,與擁有S極磁性的轉予2互相吸引,而與擁有N極磁性的轉子1相斥。也就是說,從A相勵磁轉換至B相勵磁時,轉子轉動0.72。。
由此可知,勵磁相位隨A相→B相→C相→D相→E相→A相依次轉換,則步進電機以每次0.72。做正確的轉動。同樣,希望做反方向轉動時,只需將勵磁順序倒轉,依照A相→E相→D相→C相→B相→A相勵磁即可。實際上。步進電機是由驅動器來進行勵磁相的轉換的,而勵磁相的轉換時機則是由輸入驅動器的脈沖信號所掌握。以上舉的是一相位勵磁的例子,實際運轉時,為有效利用線圈會同時進行四相或五相勵磁。
0.72。的高分辨率,取決于定子和轉子構造上的機械偏移量,所以不需要編碼器等傳感器即可正確定位。由于當第一組定子正好與對應的轉子相吸引時,勢必會導致第二組定子與對應的轉子相偏離(定子與轉子齒距一樣,但是各自所在的兩個圓不一樣大),而這個偏離值正好是齒距的十分之一。因此,普通五相步進的步距角為360。/50齒/10=0.729。.
7.3.3步進電機工作方式
下面以三相步進電機為例,對三相步進電機的單、雙三拍工作方式和六拍工作方式做原理介紹。
(1)三拍工作方式
三相步進電機如果按A相一B相一C相一A相方式循環通電工作,稱為單三拍工作方式。在單三拍工作方式時,各相通電的波形如圖7-10所示。

(2)雙三拍工作方式
在雙三拍工作方式中,步進電機正轉的通電順序為AB→BC→CA;反轉的通電順序為BA→AC—CB。在雙三拍工作方式時,各相通電的波形如圖7-11所示。

(3)六拍工作方式
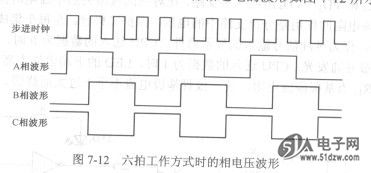
六拍工作方式是采用單三拍與雙三拍交替使用的一種方法,也稱做單雙六拍或1一2相勵磁法。步進電機正轉的通電順序為A→AB→B→BC→C→CA;反轉的通電順序為A→AC→C→CB→B→BA。在用六拍工作方式時,各相通電的波形如圖7-12所示。
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元器件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。這一線性關系的存在,加上步進電機只有周期性的單步誤差和累積誤差等特點,使步進電機廣泛用于需要角度轉動精確計量等領域。例如,機器人手臂的運動、高級字輪的字符選擇、計算機驅動器的磁頭控制、打印機的字頭控制等,都要用到步進電機。由于輸入的是脈沖信號,輸出的角位移是斷續的,所以又稱為脈沖電機。步進電機種類很多,按結構可分為反應武、永磁式和混合式步進電機3種;按相數分則可分為單相、兩相和多相3種。步進電機只有在通電的情況下,才具備自我保持力:在停電的情況下,自我保持力消失。
7.3.1步進電機的構造
步進電機的轉子為多極分布,定子上嵌有多相星形連接的控制繞組,由專門電源輸入電脈沖信號,每輸入一個脈沖信號,步進電機的轉子就旋轉一步。步進電機的構造(以五相步進為例)如圖7-8所示,分為定子與轉子兩部分。
轉子由轉子1、轉子2、永久磁鋼等3部分構成。而且轉子朝軸方向已經磁化,轉子1為N極時,轉子2則為S極。定子擁有10個小齒狀的磁極,每對磁極均繞有線圈。其線圈對角位置的磁極相互連接,電流流通后,線圈就會被磁化成同一極性。對角線的2個磁極形成一相,因此具有A相至E相5個相位,所以稱為五相步進電機,如圖7-9所示。轉子的外圈由50小齒構成,轉子l和轉子2的小齒在構造上互相錯開1/2螺距。由此轉予形成了100個小齒,小齒對數越多,其步進精度越高。
7.3.2步進電機運轉原理
給處于錯齒狀態的相通電勵磁,則轉子在電磁力的作用下,將向磁導率最大(或磁阻最小)的位置轉動。A相勵磁時,會使磁極磁化成S極,與帶有N極磁性的轉子1的小齒互相吸引,并與帶有S極磁性的轉子2的小齒相斥,平衡后停止。此時,沒有勵磁的B相磁極的小齒和帶有S極磁性的轉子2的小齒互相偏離0.72。。當由A相勵磁轉為B相勵磁時,B相磁極磁化成N極,與擁有S極磁性的轉予2互相吸引,而與擁有N極磁性的轉子1相斥。也就是說,從A相勵磁轉換至B相勵磁時,轉子轉動0.72。。
由此可知,勵磁相位隨A相→B相→C相→D相→E相→A相依次轉換,則步進電機以每次0.72。做正確的轉動。同樣,希望做反方向轉動時,只需將勵磁順序倒轉,依照A相→E相→D相→C相→B相→A相勵磁即可。實際上。步進電機是由驅動器來進行勵磁相的轉換的,而勵磁相的轉換時機則是由輸入驅動器的脈沖信號所掌握。以上舉的是一相位勵磁的例子,實際運轉時,為有效利用線圈會同時進行四相或五相勵磁。
0.72。的高分辨率,取決于定子和轉子構造上的機械偏移量,所以不需要編碼器等傳感器即可正確定位。由于當第一組定子正好與對應的轉子相吸引時,勢必會導致第二組定子與對應的轉子相偏離(定子與轉子齒距一樣,但是各自所在的兩個圓不一樣大),而這個偏離值正好是齒距的十分之一。因此,普通五相步進的步距角為360。/50齒/10=0.729。.
7.3.3步進電機工作方式
下面以三相步進電機為例,對三相步進電機的單、雙三拍工作方式和六拍工作方式做原理介紹。
(1)三拍工作方式
三相步進電機如果按A相一B相一C相一A相方式循環通電工作,稱為單三拍工作方式。在單三拍工作方式時,各相通電的波形如圖7-10所示。
(2)雙三拍工作方式
在雙三拍工作方式中,步進電機正轉的通電順序為AB→BC→CA;反轉的通電順序為BA→AC—CB。在雙三拍工作方式時,各相通電的波形如圖7-11所示。
(3)六拍工作方式
六拍工作方式是采用單三拍與雙三拍交替使用的一種方法,也稱做單雙六拍或1一2相勵磁法。步進電機正轉的通電順序為A→AB→B→BC→C→CA;反轉的通電順序為A→AC→C→CB→B→BA。在用六拍工作方式時,各相通電的波形如圖7-12所示。
上一篇:直流電機驅動接口電路
上一篇:單電壓驅動
 相關技術資料
相關技術資料- 11-23模擬和混合信號平臺Treo詳情
- 11-23PXI和LXI模塊化解決方案解讀
- 11-23AN-13-0004_CAN收發器結構參數特點應用設計
- 11-23屏蔽柵槽溝技術 (SGT)主要特性及功能應用
- 11-23第一代SGT MOSFET系列技術結構參數封裝
- 11-23全球首顆GSE DPU芯片發布
- 11-22新一代5G-A模組RG650V-NA結構技術參數應用及需求分析
- 11-22電池儲能系統 (BESS)結構設計及解決方案
- 11-22全新高脈沖制動電阻系列參數技術應用設計
- 11-22Telcordia GR-468 CORE測試應用全
- 11-22DSP(數字信號處理器)系列介紹
- 11-22AI ISP的技術優勢和市場發展趨勢

 公網安備44030402000607
公網安備44030402000607





