
數字PID參數整定
發布時間:2011/10/8 9:51:37 訪問次數:1838
理論和實踐都表明,PID控制器的KP、T1、TD各參數與系統的動態和穩態性能關系密切,都起著重要作用。 OB2263AP
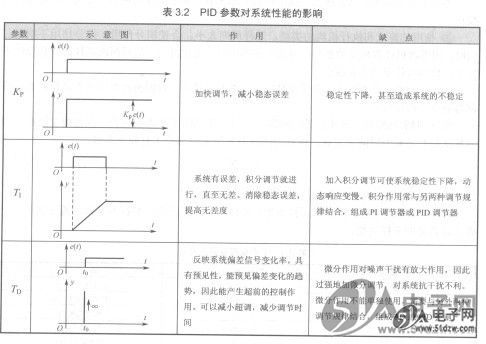
1.比例系數KP對系統性能的影響
(1)對動態性能的影響
比例系數KP太小,系統動作緩慢;比例系數KP增大使系統動作靈敏,加快調節速度,但Kp偏大,容易引起系統振蕩,反而使調節時間加長,甚至使系統不穩定。
(2)對靜態性能的影響
在系統穩定的前提下,加大比例系數KP可以減小靜差,提高控制精度,但不能完全消除靜差。
2.積分時間常數T1對系統性能的影響
積分控制常與比例和微分控制共同作用,構成PI控制器或PID控制器。
(1)對動態性能的影響
積分時間常數乃太大,積分作用對系統的影響減小,系統響應速度變慢:減小積分時間常數死,系統響應變快,但振蕩次數增多,T1偏小,系統振蕩加劇,容易使系統不穩定。選擇合適的兀值,可使系統的過渡特性比較理想。
(2)對靜態性能的影響
只要有足夠的時間,積分控制作用可以完全消除靜差,提高控制精度;但若T1太小,則積分作用太強,系統超調加大,反而不能完全消除靜差。
3.微分時間常數TD對系統性能的影響
微分控制也不能單獨使用,一般與比例控制或微分控制聯合使用,構成PD控制器或PID控制器。微分控制對系統性能的影響主要是減小超調量,縮短調節時間,允許加大比例控制,從而減小靜差和改善動態特性。當TD偏大時,系統超調較大,調節時間加長;當TD偏小時,微分作用不明顯,超調也較大,調節時間也較長;只有當TD值取得合適時,才能得到比較滿意的調節品質。
PID參數對系統性能的影響如表3.2所示。
理論和實踐都表明,PID控制器的KP、T1、TD各參數與系統的動態和穩態性能關系密切,都起著重要作用。 OB2263AP
1.比例系數KP對系統性能的影響
(1)對動態性能的影響
比例系數KP太小,系統動作緩慢;比例系數KP增大使系統動作靈敏,加快調節速度,但Kp偏大,容易引起系統振蕩,反而使調節時間加長,甚至使系統不穩定。
(2)對靜態性能的影響
在系統穩定的前提下,加大比例系數KP可以減小靜差,提高控制精度,但不能完全消除靜差。
2.積分時間常數T1對系統性能的影響
積分控制常與比例和微分控制共同作用,構成PI控制器或PID控制器。
(1)對動態性能的影響
積分時間常數乃太大,積分作用對系統的影響減小,系統響應速度變慢:減小積分時間常數死,系統響應變快,但振蕩次數增多,T1偏小,系統振蕩加劇,容易使系統不穩定。選擇合適的兀值,可使系統的過渡特性比較理想。
(2)對靜態性能的影響
只要有足夠的時間,積分控制作用可以完全消除靜差,提高控制精度;但若T1太小,則積分作用太強,系統超調加大,反而不能完全消除靜差。
3.微分時間常數TD對系統性能的影響
微分控制也不能單獨使用,一般與比例控制或微分控制聯合使用,構成PD控制器或PID控制器。微分控制對系統性能的影響主要是減小超調量,縮短調節時間,允許加大比例控制,從而減小靜差和改善動態特性。當TD偏大時,系統超調較大,調節時間加長;當TD偏小時,微分作用不明顯,超調也較大,調節時間也較長;只有當TD值取得合適時,才能得到比較滿意的調節品質。
PID參數對系統性能的影響如表3.2所示。
 相關技術資料
相關技術資料- 6-27PCB中間的晶振與參考接地板之間的電場分布
- 4-22輸出ESD保護
- 10-8數字PID參數整定
 公網安備44030402000607
公網安備44030402000607





