
最壞與最佳情況覆蓋
發布時間:2012/3/30 20:13:45 訪問次數:1673
最壞與最佳情況覆蓋算法同時 A6H-8102-P屬于確定性網絡路徑/目標覆蓋和柵欄覆蓋類型,算法考慮如何對穿越網絡的目標或其所在路徑上各點進行感應與追蹤,體現了一種網絡的覆蓋性質。Meguerdichian等定義了“最大突破路徑”(Maximal Breach Path)和“最大支撐路徑”(MaximalSupport Path),分別使得路徑上的點到周圍最近傳感器的最小距離最大化及最大距離最小化。顯然,這兩種路徑分別代表了無線傳感器網絡最壞(不被檢測概率最小)和最佳(被發現的概率最大)的覆蓋情況。文中分別采用計算幾何中的Voronoi圖與Delaunay三角形來完成最大突破路徑和最大支撐路徑的構造和查找。其中,Voronoi圖是由所有Delaunay蘭角形邊上的垂直平分線形成;而Delaunay三角形的各頂點為網絡的傳感器節點,并滿足子三角形外接圓中
不含其他節點,如圖3-23所示。
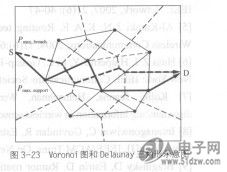
由于Voronoi圖中的線段具有到最近的傳感器節點距離最大的性質,因此最大突破路徑一定是由Voronoi圖中的線段組成。
最壞與最佳情況覆蓋算法同時 A6H-8102-P屬于確定性網絡路徑/目標覆蓋和柵欄覆蓋類型,算法考慮如何對穿越網絡的目標或其所在路徑上各點進行感應與追蹤,體現了一種網絡的覆蓋性質。Meguerdichian等定義了“最大突破路徑”(Maximal Breach Path)和“最大支撐路徑”(MaximalSupport Path),分別使得路徑上的點到周圍最近傳感器的最小距離最大化及最大距離最小化。顯然,這兩種路徑分別代表了無線傳感器網絡最壞(不被檢測概率最小)和最佳(被發現的概率最大)的覆蓋情況。文中分別采用計算幾何中的Voronoi圖與Delaunay三角形來完成最大突破路徑和最大支撐路徑的構造和查找。其中,Voronoi圖是由所有Delaunay蘭角形邊上的垂直平分線形成;而Delaunay三角形的各頂點為網絡的傳感器節點,并滿足子三角形外接圓中
不含其他節點,如圖3-23所示。
由于Voronoi圖中的線段具有到最近的傳感器節點距離最大的性質,因此最大突破路徑一定是由Voronoi圖中的線段組成。
上一篇:輪換活躍/休眠節點的Self-Schedul.ng覆蓋協議
上一篇: 無線傳感器網絡定位技術
 相關技術資料
相關技術資料- 3-30最壞與最佳情況覆蓋
- 相關IC型號
- A6H-8102-P
- 暫無最新型號
 公網安備44030402000607
公網安備44030402000607





