
低壓差穩壓器
發布時間:2012/6/20 19:48:12 訪問次數:2130
同步偏置電路的工作原XC9536XLVQG44-10C理如圖7虛線框內的部分所示,其工作過程是:無信號時,輸出O點的電位為零。此時適當調整、U2和U3可使B點的電位低于A、C點的電位,E點的電位高于D、F點電位。二極管VDl-VD4均導通,Vl-5、VT7、Vl-6、VT8的靜態電流由U1、U2、U3共同決定。如果輸入正信號,使A點電位升高,B點電位跟著升高,引起VT5、VT7的電流增大,vT7的發射極電流,在發射極電阻Re7上產生較大的電壓。此時,如果輸出級是單一偏置(U1)的普通乙類放大電路,便會增大而使G點的電位高于0點電位,使VT8變成反向偏置而進入截止狀態。但同步偏置電路里,U3通過VD4的耦合,使Vl-6基極的瞬時電位/在隨放大器輸出電壓、的升高而變化,其值總比uo低一個值(U3減去VD4的正向壓降)。也就是說,VT6、VT8在整個正信號輸入過程,一直保持由U提供的正向偏置,不會進入截止狀態,避免了開、關情況的發生。這時由于輸入正信號,D點的電位也升高,二極管VD3裁止。由于較大,使得C點電位低于B點電位,VD2也截止。輸入負信號時A點、D點電位降低,VD2、VD3導通,VD1、VD4截止,VT5、VT7由U維持足夠的正向偏置,不會進入截止狀態。可見,同步偏置電路是借助二極管的開關作用和恒定偏置電壓U2、U3,使功放管不再出現導通一截止的開關過程。只要VD1~VD4的開關性能比推動管和功放管好,開關失真便可克服。另外,為了抑制交越失真,VD1—VD4-選用低正向壓降二極管,使輸出級的推挽工作過程更接近線性。
關于二極管的選用,筆者用2AP9、2AK7、1N4148、1N60P做對比試驗:輸入端送入一個正弦波,用雙蹤示波器觀察輸入、輸出波形。只要適當調整U1、U2、U3使VD1~VD44于導通狀態(流過lmA左右的正向電流),輸出波形都很光滑流暢,看不到關失真和交越失真的跡象。分別調節示波器Y1、Y2增益,使輸出波形與輸入波形完全重合,把示波器的一蹤置于倒相狀態,得到輸出與輸入相減的波形——即失真波形,如圖8所示。這種方法雖不能得到定量分析的結果,但完全可定性的說明問題。反復比較幾種失真波形,決定選用1N60P。1N60P足低正向壓降、高速開關二極管.1mA電流時的正向壓降約0.2V。
在本機中,U1由電壓放大器WH0503內的恒壓偏置電路擔任,U2、乙B由WH0504擔任。調整圖6中的RP1、RP2即可改變功放管的靜態電流。
推動管由兩對2SC5171、2SA1930并聯,每管靜態電流約20mA。末級功放管用5對NJW0281G、NJW0302G并聯(每聲道10對),每管靜態電流為50—100mA,最大不失真輸出時,每管工作電流達到400~450mA。每聲道最大不失真功率8Q時不小于120W,4Q時不小于200W。
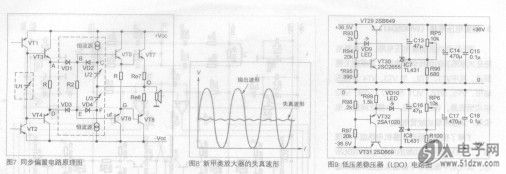
圖6中的R71~R90和功放管射極電阻R51~R70,以及圖10中的VD11—VD14、R101、R103組成功放管電流監測取樣電路。
IC4為直流伺服電路,R23、R24把36V降壓后給運放提供工作電壓。IC5、IC6把36V降壓后給緩沖器WH0502提供工作電壓。電壓放大器WH0503的工作電壓由低壓差穩壓器(LDO)做二次穩壓后提供。在大信號下,信號諧波通過推動管集電極竄入電源,僅靠退耦電容不能完全濾除,增加二次穩壓,使供給WH0503的電源紋波更小、更平穩。
圖9所示的是由TL431枸成的低壓差穩壓器(LDO)電路圖。它的工作過程是(以正電源為例):TL431的R端輸出穩定的2.5V基準電壓,決定了流經RP5和R96的電流(流經RP5的電流還有流入R端的電流k,由于該電流很小,權且忽略)是穩定的,即輸出電壓是穩定的。TL431的K端有吸納或吐出電流的雙重功能,當輸出電流或輸入電壓發生波動時,靠K端吸收或吐出電流調Vl-30的基極電流,進而改變調整管Vl-29的ce壓降,使輸出電壓回到穩定值。只要VT29的基極注入電流(即Vl-30的集電極電流)大于輸出電流除以VT29的放大倍數.VT29的ce壓降就等于它的飽和壓降,這樣便達到了低壓差輸出的目的。C13對降低電源的紋波有很大作用,但不宜太大,否則會因充電電流過大而燒壞TL431。C14可盡量大一點,有利于降低紋波。該電源輸出電流1COmA時壓差小于0.5V,紋波峰峰值小于2mV(示波器觀察)。調整R95、R99可改變其額定電流,其阻值大小與VT29、Vl-30的放大倍數有關,放大倍數越大其阻值越小。發光二極管僅作指示用。
同步偏置電路的工作原XC9536XLVQG44-10C理如圖7虛線框內的部分所示,其工作過程是:無信號時,輸出O點的電位為零。此時適當調整、U2和U3可使B點的電位低于A、C點的電位,E點的電位高于D、F點電位。二極管VDl-VD4均導通,Vl-5、VT7、Vl-6、VT8的靜態電流由U1、U2、U3共同決定。如果輸入正信號,使A點電位升高,B點電位跟著升高,引起VT5、VT7的電流增大,vT7的發射極電流,在發射極電阻Re7上產生較大的電壓。此時,如果輸出級是單一偏置(U1)的普通乙類放大電路,便會增大而使G點的電位高于0點電位,使VT8變成反向偏置而進入截止狀態。但同步偏置電路里,U3通過VD4的耦合,使Vl-6基極的瞬時電位/在隨放大器輸出電壓、的升高而變化,其值總比uo低一個值(U3減去VD4的正向壓降)。也就是說,VT6、VT8在整個正信號輸入過程,一直保持由U提供的正向偏置,不會進入截止狀態,避免了開、關情況的發生。這時由于輸入正信號,D點的電位也升高,二極管VD3裁止。由于較大,使得C點電位低于B點電位,VD2也截止。輸入負信號時A點、D點電位降低,VD2、VD3導通,VD1、VD4截止,VT5、VT7由U維持足夠的正向偏置,不會進入截止狀態。可見,同步偏置電路是借助二極管的開關作用和恒定偏置電壓U2、U3,使功放管不再出現導通一截止的開關過程。只要VD1~VD4的開關性能比推動管和功放管好,開關失真便可克服。另外,為了抑制交越失真,VD1—VD4-選用低正向壓降二極管,使輸出級的推挽工作過程更接近線性。
關于二極管的選用,筆者用2AP9、2AK7、1N4148、1N60P做對比試驗:輸入端送入一個正弦波,用雙蹤示波器觀察輸入、輸出波形。只要適當調整U1、U2、U3使VD1~VD44于導通狀態(流過lmA左右的正向電流),輸出波形都很光滑流暢,看不到關失真和交越失真的跡象。分別調節示波器Y1、Y2增益,使輸出波形與輸入波形完全重合,把示波器的一蹤置于倒相狀態,得到輸出與輸入相減的波形——即失真波形,如圖8所示。這種方法雖不能得到定量分析的結果,但完全可定性的說明問題。反復比較幾種失真波形,決定選用1N60P。1N60P足低正向壓降、高速開關二極管.1mA電流時的正向壓降約0.2V。
在本機中,U1由電壓放大器WH0503內的恒壓偏置電路擔任,U2、乙B由WH0504擔任。調整圖6中的RP1、RP2即可改變功放管的靜態電流。
推動管由兩對2SC5171、2SA1930并聯,每管靜態電流約20mA。末級功放管用5對NJW0281G、NJW0302G并聯(每聲道10對),每管靜態電流為50—100mA,最大不失真輸出時,每管工作電流達到400~450mA。每聲道最大不失真功率8Q時不小于120W,4Q時不小于200W。
圖6中的R71~R90和功放管射極電阻R51~R70,以及圖10中的VD11—VD14、R101、R103組成功放管電流監測取樣電路。
IC4為直流伺服電路,R23、R24把36V降壓后給運放提供工作電壓。IC5、IC6把36V降壓后給緩沖器WH0502提供工作電壓。電壓放大器WH0503的工作電壓由低壓差穩壓器(LDO)做二次穩壓后提供。在大信號下,信號諧波通過推動管集電極竄入電源,僅靠退耦電容不能完全濾除,增加二次穩壓,使供給WH0503的電源紋波更小、更平穩。
圖9所示的是由TL431枸成的低壓差穩壓器(LDO)電路圖。它的工作過程是(以正電源為例):TL431的R端輸出穩定的2.5V基準電壓,決定了流經RP5和R96的電流(流經RP5的電流還有流入R端的電流k,由于該電流很小,權且忽略)是穩定的,即輸出電壓是穩定的。TL431的K端有吸納或吐出電流的雙重功能,當輸出電流或輸入電壓發生波動時,靠K端吸收或吐出電流調Vl-30的基極電流,進而改變調整管Vl-29的ce壓降,使輸出電壓回到穩定值。只要VT29的基極注入電流(即Vl-30的集電極電流)大于輸出電流除以VT29的放大倍數.VT29的ce壓降就等于它的飽和壓降,這樣便達到了低壓差輸出的目的。C13對降低電源的紋波有很大作用,但不宜太大,否則會因充電電流過大而燒壞TL431。C14可盡量大一點,有利于降低紋波。該電源輸出電流1COmA時壓差小于0.5V,紋波峰峰值小于2mV(示波器觀察)。調整R95、R99可改變其額定電流,其阻值大小與VT29、Vl-30的放大倍數有關,放大倍數越大其阻值越小。發光二極管僅作指示用。
上一篇:偏置電壓電路(WH0504)
上一篇:保護電路
 相關技術資料
相關技術資料- 6-20低壓差穩壓器
熱門點擊
- 矢量控制原理圖
- Pioneer SA-1520的電平顯示電路
- 采用零偏置JFET的放大電路
- 芯片功能說明
- 高頻截止頻率
- 低壓差穩壓器
- 程序中對按鍵處理方法
- 測定輸入阻抗
- 變頻器輸出側增加輸出濾波器
- 頻率調制音頻信號-FM
推薦技術資料

- 循線機器人是機器人入門和
- 循線機器人是機器人入門和比賽最常用的控制方式,E48S... [詳細]
 公網安備44030402000607
公網安備44030402000607





