
用汽車遙控鑰匙遙控機器人
發布時間:2013/11/20 19:12:19 訪問次數:1436
無線遙控也是機器人常用的控制方式之一。特別是低成本的方案,EDI188512CA20CB更有利于機器人活動的普及。本節向讀者介紹如何用汽車遙控鑰匙套件實現無線遙控。
說到汽車遙控鑰匙或振警器,大家都很熟悉(見圖19)。其發射器很小巧,用戶一般都掛在鑰匙鏈上,接收器也是一塊很小的板子(見圖20)。
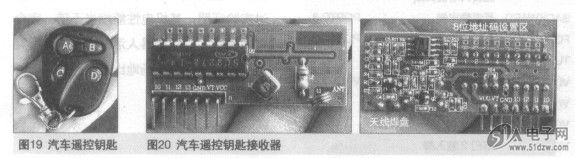
無線遙控車鎖已是很成熟的技術,一般是超再生或超外差式電路,收/發的通信方式為調幅AM,頻率設定為316.8MHz。
有讀者會問,這些遙控器工作在同一個頻率,如何互不干擾呢?答案是依靠編碼來區分。以PT2262/PT2272編/解碼芯片為例,它有8位3態的地址引腳,可以有懸空、接高電平、接低電平3種狀態,很容易實現互不干擾的遙控。
有關編/解碼器芯片的詳細技術細節不是本文的重點,我們只討論如何應用現成套件實現機器人遙控。套件在電子配套市場都可以買到,我們所要做的是將解碼電路的輸出與我們的單片機配合,從而操控機器人的運動。
我們選用的是4通道遙控器,即發射器上有4個按鈕,一般標為A、B、C、D。這4個按鈕對應接收電路的4個引腳,如圖21所示。引腳A、B、C、D和10平時為低電平,當你按下發射器的某個按鈕 i(比如按鈕A)時,則接收器的對應引腳(引腳A)變為高電平,同時IO也為高,而其他引腳不變。如此,我們的軟件編程思路也就有了。我們可以利用引腳10產生外部中斷,然后檢測A、B、C、D引腳的狀態,進而控制機器人小車的運動,流程如圖22所示。
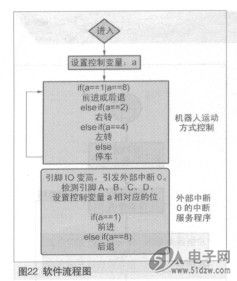
硬件連接非常簡單。我在實驗中定義A為前進,D為后退,B為左轉,C為右轉,用端口PORTC的0、1、2、3引腳分別接接收板的A、B、C、D引腳,引腳10接PORTD的第2引腳,即中斷0的引腳,設置中斷O上升沿引發中斷即可。
實踐證明,該方案在近距離、小場地的環境下可以實現滿意的遙控效果,而且設備購置的費用低廉,很適合入門級的普及活動。問題是車控鎖的接收板對電壓要求較高,如果供電電壓低于5V,其靈敏度會大大下降。另外,其接收天線的長度要在23—25cm之間,以保證與316AM波的最佳諧振。接下來,我們組織一場機器人足球比賽吧j上場選手需準備至少兩套不同編碼設置的遙控套件,這樣就不會互相干擾,剩下的就看你的了。
無線遙控也是機器人常用的控制方式之一。特別是低成本的方案,EDI188512CA20CB更有利于機器人活動的普及。本節向讀者介紹如何用汽車遙控鑰匙套件實現無線遙控。
說到汽車遙控鑰匙或振警器,大家都很熟悉(見圖19)。其發射器很小巧,用戶一般都掛在鑰匙鏈上,接收器也是一塊很小的板子(見圖20)。
無線遙控車鎖已是很成熟的技術,一般是超再生或超外差式電路,收/發的通信方式為調幅AM,頻率設定為316.8MHz。
有讀者會問,這些遙控器工作在同一個頻率,如何互不干擾呢?答案是依靠編碼來區分。以PT2262/PT2272編/解碼芯片為例,它有8位3態的地址引腳,可以有懸空、接高電平、接低電平3種狀態,很容易實現互不干擾的遙控。
有關編/解碼器芯片的詳細技術細節不是本文的重點,我們只討論如何應用現成套件實現機器人遙控。套件在電子配套市場都可以買到,我們所要做的是將解碼電路的輸出與我們的單片機配合,從而操控機器人的運動。
我們選用的是4通道遙控器,即發射器上有4個按鈕,一般標為A、B、C、D。這4個按鈕對應接收電路的4個引腳,如圖21所示。引腳A、B、C、D和10平時為低電平,當你按下發射器的某個按鈕 i(比如按鈕A)時,則接收器的對應引腳(引腳A)變為高電平,同時IO也為高,而其他引腳不變。如此,我們的軟件編程思路也就有了。我們可以利用引腳10產生外部中斷,然后檢測A、B、C、D引腳的狀態,進而控制機器人小車的運動,流程如圖22所示。
硬件連接非常簡單。我在實驗中定義A為前進,D為后退,B為左轉,C為右轉,用端口PORTC的0、1、2、3引腳分別接接收板的A、B、C、D引腳,引腳10接PORTD的第2引腳,即中斷0的引腳,設置中斷O上升沿引發中斷即可。
實踐證明,該方案在近距離、小場地的環境下可以實現滿意的遙控效果,而且設備購置的費用低廉,很適合入門級的普及活動。問題是車控鎖的接收板對電壓要求較高,如果供電電壓低于5V,其靈敏度會大大下降。另外,其接收天線的長度要在23—25cm之間,以保證與316AM波的最佳諧振。接下來,我們組織一場機器人足球比賽吧j上場選手需準備至少兩套不同編碼設置的遙控套件,這樣就不會互相干擾,剩下的就看你的了。
上一篇:滑雪繞樁機器人
上一篇:用玩具遙控哭搖控機器人
 相關技術資料
相關技術資料- 11-20用汽車遙控鑰匙遙控機器人
- 相關IC型號
- EDI188512CA20CB
- 暫無最新型號

 公網安備44030402000607
公網安備44030402000607





