
直線誤差
發布時間:2014/12/9 20:49:16 訪問次數:1246
直線誤差 路徑L:的激光A40MX02-FPL68測量死程誤差與兩個光學元件間的距離有關,此時系統定標為L,(詳細請參考激光干涉儀說明書)。若干涉鏡及反射銃之間沒有動作,且激光束四周的環境狀況有所改變,整個路徑(L,+L2)的波長(空氣中)都會改變,但激光測
量系統只會對L2距離進行補償。因此,死程測量誤差會由于光束路徑L,沒有獲得補償而產生。
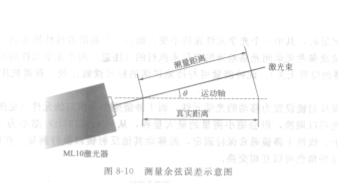
余弦誤差 激光束路徑與運動軸之間存在的任何未準直都會造成測得的距離和實際的運動距離之間有差異,如圖8-10所示。此未準直誤差通常被稱為余弦誤差。此誤差的大小與激光束和運動軸間的未準直角度有關,當激光測量系統與運動軸未準直時,余弦誤差會使得測量的距離比實際距離要短。隨著角度未準直的增加,誤差也跟著顯著增加,要使余弦誤差達到最小,測量激光束必須準直,并與運動軸平行。在長度為Im的軸上,使用提供的
準直步驟很容易達到這個目的。但在較短的軸上就變得相當困難,需用下面方法來最優化準直并使余弦誤差最小:
·最大化激光讀數;
·自動反射方式;
·設置直線度測量過程中的斜率消除最大化激光測量讀數,若激光測量出現余弦誤差,則激光讀數將會小于原本應有的數值。因此,通過仔細調整激光頭的俯仰及偏轉,直到取得最大的激光讀數,就能消除短軸上的余弦誤差。
①沿著運動軸準直光束。
②移動軸以使鏡組靠近并定標激光讀數。
③移動軸,使鏡組彼此離得越遠越好。
④仔細調整激光頭的俯仰和偏轉控制,取得最大的激光測量讀數。
直線誤差 路徑L:的激光A40MX02-FPL68測量死程誤差與兩個光學元件間的距離有關,此時系統定標為L,(詳細請參考激光干涉儀說明書)。若干涉鏡及反射銃之間沒有動作,且激光束四周的環境狀況有所改變,整個路徑(L,+L2)的波長(空氣中)都會改變,但激光測
量系統只會對L2距離進行補償。因此,死程測量誤差會由于光束路徑L,沒有獲得補償而產生。
余弦誤差 激光束路徑與運動軸之間存在的任何未準直都會造成測得的距離和實際的運動距離之間有差異,如圖8-10所示。此未準直誤差通常被稱為余弦誤差。此誤差的大小與激光束和運動軸間的未準直角度有關,當激光測量系統與運動軸未準直時,余弦誤差會使得測量的距離比實際距離要短。隨著角度未準直的增加,誤差也跟著顯著增加,要使余弦誤差達到最小,測量激光束必須準直,并與運動軸平行。在長度為Im的軸上,使用提供的
準直步驟很容易達到這個目的。但在較短的軸上就變得相當困難,需用下面方法來最優化準直并使余弦誤差最小:
·最大化激光讀數;
·自動反射方式;
·設置直線度測量過程中的斜率消除最大化激光測量讀數,若激光測量出現余弦誤差,則激光讀數將會小于原本應有的數值。因此,通過仔細調整激光頭的俯仰及偏轉,直到取得最大的激光讀數,就能消除短軸上的余弦誤差。
①沿著運動軸準直光束。
②移動軸以使鏡組靠近并定標激光讀數。
③移動軸,使鏡組彼此離得越遠越好。
④仔細調整激光頭的俯仰和偏轉控制,取得最大的激光測量讀數。
上一篇:通常反射鏡設置為移動的光學元件
上一篇:操作步驟
 相關技術資料
相關技術資料- 3-19Select Sweep Parameters對話框
- 12-25觸發器的邏輯圖和邏輯符號
- 12-9直線誤差
 公網安備44030402000607
公網安備44030402000607





