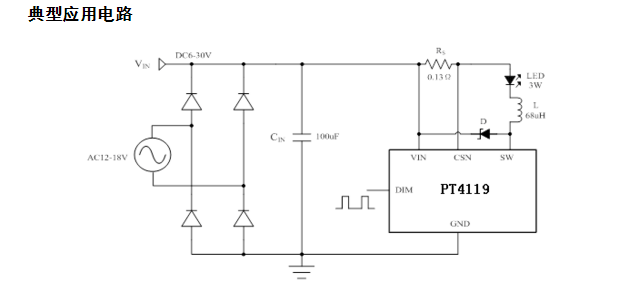
PT4119是一款連續電感電流導通模式的降壓恒流源,用于驅動一顆或多顆串聯LED。PT4119輸入電壓范圍從6伏到30伏,輸出電流可調,最大可達0.8安培。根據不同的輸入電壓和外部器件,PT4119可以驅動高達數十瓦的LED。
PT4119 內置功率開關,采用高端電流采樣設置LED平均電流,并通過DIM引腳可以接受模擬調光和很寬范圍的PWM調光。當DIM的電壓低于0.3伏時,功率開關關斷,PT4119進入極低工作電流的待機狀態。 PT4119采用SOT89-5封裝和ESOP8封裝。
特點:
極少的外部元器件
很寬的輸入電壓范圍:從6V到30V
最大輸出0.8A的電流
復用DIM引腳進行LED開關、模擬調光和PWM調光
3%的輸出電流精度
LED開路自然保護
高達97%的效率
輸出可調的恒流控制方法
增強散熱能力的ESOP8封裝可用于大功率驅動
應用:
低壓LED射燈代替鹵素燈
車載LED燈
LED備用燈
LED信號燈
PT4115
PT4119
PT4121
PT4181
PT4103
PT4110
PT5109
PT4211
PT4213
PT4205
PT4240
PT4238
PT4239
PT4501
PT4209
一級代理華潤矽威驅動芯片,歡迎來電咨詢0755-83259945陳小姐
今年三月,Intel以150億美金收購了自動駕駛領域最大的芯片公司,Mobileye。收購的新聞瞬間刷屏,但是仔細想來也是在情理之中。Intel自從去年開始就下定決心要大舉進軍人工智能,開啟了買買買模式,2016年連續出手收購了Nervana和Movidius兩家分別擅長服務器端和移動端機器學習系統的公司。目前人工智能最火的領域,除了服務器端提供AI服務(Nervana),移動端提供輕量級低延遲AI應用(Movidius)外,就是自動駕駛最火了,所以Intel繼Nervana和Movidius后的下一個收購目標選擇了Mobileye實屬合理。
而從Mobileye角度來看,它與Intel的合作其實也有一段時間,自從與Tesla合作結束后,更是一心一意地加入了自動駕駛的Intel陣營,與Intel和BMW結成了自動駕駛聯盟,共同對抗來勢洶洶的Nvidia以及Tesla。目前該聯盟還處于蜜月期,Intel和Mobileye就親上加親成了一家人,預期未來會用更多動作。
另一方面,Qualcomm也在去年宣布收購了汽車電子行業巨頭NXP。該收購案數額巨大,吸引了半導體業界幾乎所有人的目光,同時也展示了Qualcomm想從手機產業走出去的決心。Qualcomm與NXP的業務重合不多,收購后更多是業務互補,NXP的汽車電子業務將成為Qualcomm未來版圖中的重要環節。
Intel和Qualcomm,都瞄準了未來的汽車電子。顯然,未來汽車電子潛力最大的方向就是無人駕駛,然而Intel和Qualcomm選擇了截然不同的兩種通往無人駕駛的技術道路。下面為您仔細分析兩家公司的技術藍圖。
Intel:做一個機器人幫你開車
Intel由微處理器發家,借著計算機在上世紀的普及而一舉成為全球最大的半導體公司。也正是由于在計算機行業過于成功,想要接著之前在計算機行業的經驗去做移動終端業務,結果遭遇滑鐵盧,錯失了移動互聯網的風口。下一個風口是人工智能,Intel當然不想再錯過,因此連連出手大舉投資。
Intel與人工智能其實一直很接近。人工智能一直以來是計算機領域的一個分支,而Intel與計算機的淵源更是不必多說,因此Intel去做人工智能根本就不算是轉型,而只能說是稍微調整了一下計算機業務的重點布置。Intel要做自動駕駛也是以人工智能為切入點,因此要從人工智能如何實現自動駕駛來分析這件事。
人工智能從計算機誕生以來,就成為了計算機科學家一直在思考的問題,即能否用計算機實現人類的思考能力?計算機科學的祖師圖靈就思考過這個問題,還提出了著名的“圖靈準則”(即人類能否判斷與之對話的是人還是計算機)來幫助判斷計算機是否真正實現了人工智能。之后,在上世紀中葉,Minsky等人為人工智能的發展做出了卓越的貢獻,然而之后人工智能的發展卻陷入了低潮。直到十年前,基于深度神經網絡的深度學習再度崛起,讓世人的目光再次集中到了人工智能這個話題上。神經網絡是一種仿生人工智能算法,其崛起的標志性事件是2012年AlexNet的誕生,實現了在ImageNet數據集上物體識別準確率的大幅提升。之后,神經網絡越來越深,從十幾層,到微軟ResNet的一百多層,最近甚至有一千多層的深度學習網絡出現。
Intel以人工智能作為自動駕駛的技術路線,其最終目標是打造一個人工智能駕駛系統。該系統可以理解為設計制造一個機器人,這個機器人懂得用傳感器感知汽車周圍信息,并且根據人工智能算法做決策,以實現與人類一樣甚至超過人類表現的駕駛水準。就技術角度,Intel負責這個機器人的大腦(計算部分,Intel畢竟是處理器行業的老大其芯片能提供足夠強大的計算能力),而Mobileye負責機器人的眼睛(傳感器信號處理芯片,傳感器的原始數據量非常大,需要專用的高效處理芯片做預處理后再送去后端的通用處理器做自動駕駛的決策)。
Intel設想的自動駕駛系統中需要用到多種傳感器,包括攝像頭,毫米波雷達,激光雷達,超聲波傳感器等等,Intel購買Mobileye的目的,就是為了給自動駕駛系統加上一雙敏銳的雙目,實現高效傳感器融合。算法部分兩家公司各有積累,融合之后預期會有更好的算法出現。而數據方面,就要靠與Intel合作的各大車廠提供以訓練深度學習算法了。
Intel選擇的使用神經網絡人工智能的自動駕駛歸根到底是一種仿生學設計,其效法的對象就是人類本身,無非就是用傳感器替代了人類的眼睛,用深度學習算法代替了人類的大腦。從另一個角度想,人類的極限基本就決定了這套自動駕駛系統的極限。在自動駕駛分級中,這套系統支援到第三級(有條件自動化)沒有任何問題,因為自動駕駛系統并沒有完全接管汽車,這時候相當于真人駕駛員是駕校教練坐在副駕上,而自動駕駛系統是新司機(雖然這個新司機在大多數時候比真人老司機開得更好!),一旦自動駕駛出了什么問題真人老司機立馬介入避免事故。
然而,到了第三級以上的自動駕駛(副駕真人老司機在開車過程中基本可以打瞌睡不管自動駕駛系統),人工智能想要真正接管汽車還有不少問題。目前人工智能中深度學習的原理是使用海量數據去訓練網絡,深度學習網絡在訓練后可以根據輸入數據做決策。然而,數據即使再大,也不可能覆蓋所有狀況,在很多意想不到的情況下算法可能出錯。例如,就拿基于攝像頭的自動駕駛來說,攝像頭首先獲取圖像數據,之后處理器在圖像上做分割,將背景與前景物體分割開,再識別前景中的道路,車道,活動物體(包括其他汽車,自行車,行人),估計這些物體與車的距離,并做駕駛決策。然而,無論是圖像分割,物體識別,還是距離估計,都可能出錯,而且出錯的地方往往意想不到。之前Tesla的自動駕駛因為沒能識別前方的白色大卡車而產生了車禍,據報道援引可能是算法把大卡車當成了白云。這樣的錯誤在人類看來不可思議,但是在基于深度學習的人工智能中卻非常有可能,只要訓練數據中沒有包括這種情況就有機會犯這種錯誤。然而,駕駛時路況千變萬化,訓練數據理論上不可能覆蓋所有狀況,永遠有這類落網之魚。即使統計學上的概率非常非常小,但是對于每個車主來說一旦發生了就是發生了。而且,一旦發生事故,如何界定法律責任也是一個問題,究竟是車廠的責任還是司機的責任,也是一個尚待解決的問題
另外,這還牽涉到了車主對自動駕駛的信任問題。雖然現在人工智能使用的深度學習網絡研究非常火熱,但并不代表人們已經理解了深度學習網絡。深度學習的基礎是統計學,網絡的效果好壞也是看測試數據集上的測試準確率,因此人們不完全明白深度學習網絡的決策過程,一個典型的例子是AlphaGO對戰李世石的時候專業棋手連連表示看不懂AlphaGO的思路,但是最后AlphaGO就是在一片“看不懂”中贏下了比賽。往好里說,這是神奇,是潛力無窮,往壞里說,這是不確定性大。Tesla的自動駕駛汽車能高難度過彎卻會陰溝里翻船,將來自動汽車也可能在完全不確定的地方出事故,讓車主不能完全信賴。說到底,這個信任問題的根源,還是因為人工智能自動駕駛完全依賴于一個人類還不能完全理解的技術。
小結:Intel基于人工智能的自動駕駛技術是想做一個和人一樣根據周圍環境做決策完成駕駛任務的系統。Intel的技術可以快速搶占目前主流的0-3級自動駕駛市場,但是在更高級的自動駕駛(即自動駕駛系統掌握車輛的更多主控權)領域,光靠人工智能是不夠的。
那么,更高級的自動駕駛市場要靠什么?要靠未來交通的基礎設施,即車聯網(V2V,V2X)。而這是Qualcomm與NXP更擅長的。
Qualcomm:設計新型汽車自己就能開
Qualcomm的自動駕駛思路與Intel完全不同。如果說Intel是計算機科學家的思路走人工智能,那么Qualcomm就是電子工程師的思路走自動化控制,即車聯網。在車聯網時代,每輛車以及路上的交通設施都與網絡連接傳遞信息,這樣車可以根據從車聯網獲得的信息來做駕駛決策判斷,從而實現自動駕駛。
車聯網包括車與車之間的通訊,也包括車與其他設施之間的通訊。車與車之間的通訊可以讓每輛車都掌握附近車的信息,例如距離,時速等等。這一方面可以避免交通事故,另一方面也可以增加駕駛效率。例如,現在在開車的時候大家都會與前車保持足夠的車距防止前車突然剎車,有了車聯網之后前車剎車的第一時間你的車就會知道并且同步減速,這樣即使車之間的間距很小也問題不大。這個技術目前已經用在了NXP給卡車車隊開發的系統中,在這樣的車隊里每一輛車的駕駛過程都是同步的,從而可以省去不少因為加速減速的浪費的汽油。車與其他設施之間的通訊也非常有用,例如車輛可以與路牌通訊知道目前的限速。
舉個例子來說明Intel和Qualcomm技術的不同思路。下雨天的時候,純粹基于人工智能的自動駕駛容易出問題,因為車道分割線在下雨天的時候很模糊,人類都看不清楚,人工智能使用機器視覺也一樣看不清楚,所以無法很好地識別車道,可能會開著開著就開到其他道上去了。車聯網的思路就不同,識別車道壓根不是靠機器視覺,而是可以靠道路的基礎設施建設使道路交通智能化。例如,可以在車道的分割線上安裝射頻標簽,汽車靠與這些射頻標簽通訊就可以知道自己有沒有行駛在道路中央,甚至還可以獲得前方道路是否有彎之類的信息來幫助駕駛。顯然,這樣的方案不會受到天氣的影響。
從上面的例子還可以看出兩種方案的其他不同點。首先,不同于之前說到人工智能技術很多時候連研究人員都無法理解,Qualcomm使用的車聯網中每一個技術細節(主要是無線通訊)都已經被工程師們完全理解,因此不會出現人工智能在不可思議的地方出錯的問題,也不存在訓練數據不夠的問題。甚至在車聯網信號狀況不好的時候,汽車也能及時提醒司機及時接管,但是人工智能方案卻未必能實現這一點。其次,Intel的自動駕駛技術只是做局部優化,只管一輛車;而Qualcomm的車聯網則是有可以做全局優化的潛力,既然所有車都聯網了那么交通也可以根據車流做優化疏導,例如交通燈會根據車流來調整紅燈和綠燈的時間。Qualcomm車聯網方案會給汽車駕駛帶來更大的飛躍。人類開車的時候是通過眼睛看前方的路況以及車距,頭腦根據這些信息來做判斷并控制汽車。Intel的人工智能駕駛是使用傳感器代替人類眼睛,使用處理器代替人類大腦,但是人類眼睛會看錯,判斷會失誤,人工智能一樣也會犯這樣的錯誤。Qualcomm的車聯網方案根本就不需要眼睛,因為道路和車輛的實時信息已經通過網絡傳遞給車輛,所以就不會有“看錯”的問題。
當然,Qualcomm的車聯網也有一個很大的問題,就是需要把車聯網的基礎設施都建好了才能完全發揮出所有潛力,相較之下Intel的人工智能駕駛則與基礎設施沒有任何關系。事實上,車聯網與人工智能自動駕駛并不互相矛盾,相反是相輔相成的。在第0-3級自動駕駛中,人工智能即可勝任;但是到了更高級的自動駕駛,必須同時結合兩種方案才行。
公司:深圳市哲瀚電子科技有限公司
聯系人:陳小姐
手機:13714441972
電話:0755-82549527/83259945/13714441972
傳真:0755-83259945
地址:深圳市福田區深圳市福田區華強北街道深南中路3006號佳和大廈3C006