
TIBPAL20R4-20MJT 電機的位置和速度控制集成電路
發布時間:2020/3/2 8:41:17 訪問次數:698
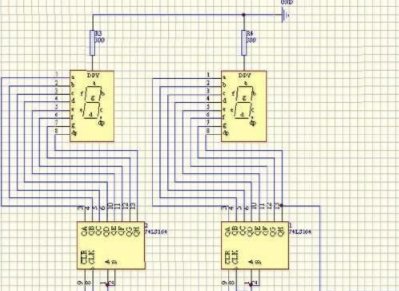
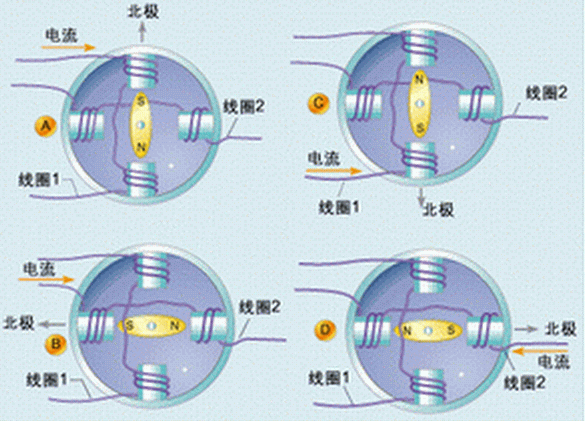
TIBPAL20R4-20MJT定子、轉子是用硅鋼片或其他軟磁材料制成的。定子的每對極上都繞有一對繞組,構成一相繞組,共三相稱為A、B、C三相。在定子磁極和轉子上都開有齒分度相同的小齒,采用適當的齒數配合,當A相磁極的小齒與轉子小齒一一對應時,B相磁極的小齒與轉子小齒相互錯開1/3齒距,C相則錯開2/3齒距。A相繞組與齒1、5一一對應,而此時B相繞組與齒2錯開1/3齒距,而與齒3錯開2/3齒距,C相繞組與齒3錯開2/3齒距,而與齒4錯開1/3齒距。電機的位置和速度由繞組通電次數(脈沖數)和頻率成一一對應關系。而方向由繞組通電的順序決定。

控制精度不同步進電機的動態力矩一下子很難確定,我們往往先確定電機的靜力矩。靜力矩選擇的依據是電機工作的負載,而負載可分為慣性負載和摩擦負載二種。一般情況下,靜力矩應為摩擦負載的2-3倍內好,靜力矩一旦選定,電機的機座及長度便能確定下來(幾何尺寸)
低頻特性不同步進電機的輸出力矩隨轉速升高而下降,且在較高轉速時會急劇下降,所以其最高工作轉速一般在300~600RPM。交流伺服電機為恒力矩輸出,即在其額定轉速(一般為2000RPM或3000RPM)以內,都能輸出額定轉矩,在額定轉速以上為恒功率輸出。
轉子的外圈由 50個小齒構成,轉子 1 和轉子 2 的小齒于構造上互 相錯開 1/2 螺距。由此轉子形成了100個小齒。目前已經有轉子單個加工至100齒的高分辨率型,那么高分辨率型的轉子就有200個小齒。因此其機械上就可以實現普通步進電機半步(普通步進電機半步需要電氣細分達到)的分辨率。
功率式:輸出轉矩較大,能直接帶動較大負載(一般使用反應式、混合式步進電動機)。
伺服式:輸出轉矩較小,只能帶動較小負載(一般使用永磁式、混合式步進電動機)。
步進電動機的選擇:
首先選擇類型,其次是具體的品種與型號。
反應式、永磁式和混合式三種步進電動機的性能指標、外形尺寸、安裝方法、脈沖電源種類和控制電路等都不同,價格差異也很大,選擇時應綜合考慮。
具有控制集成電路的步進電動機應優先考慮。

深圳市唯有度科技有限公司http://wydkj.51dzw.com/
(素材來源:21IC.如涉版權請聯系刪除。特別感謝)
TIBPAL20R4-20MJT定子、轉子是用硅鋼片或其他軟磁材料制成的。定子的每對極上都繞有一對繞組,構成一相繞組,共三相稱為A、B、C三相。在定子磁極和轉子上都開有齒分度相同的小齒,采用適當的齒數配合,當A相磁極的小齒與轉子小齒一一對應時,B相磁極的小齒與轉子小齒相互錯開1/3齒距,C相則錯開2/3齒距。A相繞組與齒1、5一一對應,而此時B相繞組與齒2錯開1/3齒距,而與齒3錯開2/3齒距,C相繞組與齒3錯開2/3齒距,而與齒4錯開1/3齒距。電機的位置和速度由繞組通電次數(脈沖數)和頻率成一一對應關系。而方向由繞組通電的順序決定。
控制精度不同步進電機的動態力矩一下子很難確定,我們往往先確定電機的靜力矩。靜力矩選擇的依據是電機工作的負載,而負載可分為慣性負載和摩擦負載二種。一般情況下,靜力矩應為摩擦負載的2-3倍內好,靜力矩一旦選定,電機的機座及長度便能確定下來(幾何尺寸)
低頻特性不同步進電機的輸出力矩隨轉速升高而下降,且在較高轉速時會急劇下降,所以其最高工作轉速一般在300~600RPM。交流伺服電機為恒力矩輸出,即在其額定轉速(一般為2000RPM或3000RPM)以內,都能輸出額定轉矩,在額定轉速以上為恒功率輸出。
轉子的外圈由 50個小齒構成,轉子 1 和轉子 2 的小齒于構造上互 相錯開 1/2 螺距。由此轉子形成了100個小齒。目前已經有轉子單個加工至100齒的高分辨率型,那么高分辨率型的轉子就有200個小齒。因此其機械上就可以實現普通步進電機半步(普通步進電機半步需要電氣細分達到)的分辨率。
功率式:輸出轉矩較大,能直接帶動較大負載(一般使用反應式、混合式步進電動機)。
伺服式:輸出轉矩較小,只能帶動較小負載(一般使用永磁式、混合式步進電動機)。
步進電動機的選擇:
首先選擇類型,其次是具體的品種與型號。
反應式、永磁式和混合式三種步進電動機的性能指標、外形尺寸、安裝方法、脈沖電源種類和控制電路等都不同,價格差異也很大,選擇時應綜合考慮。
具有控制集成電路的步進電動機應優先考慮。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
(素材來源:21IC.如涉版權請聯系刪除。特別感謝)
 相關技術資料
相關技術資料- 11-2712位模數轉換器 (ADC)參數特點技術封裝
- 11-27三角函數加速器 (TMU)系列
- 11-27單芯片“艙行泊”一體化方案探究
- 11-27CoolSiC肖特基二極管技術參數應用設計
- 11-27納微GaN Safe系列NV6515(650V,32mΩ max)IC
- 11-27臨界導通模式(CrM)詳情
- 11-27GaN HEMT IC+Si MOSFET組合
- 11-26可編程多路復用通用輸入/輸出 (GPIO)
- 11-26全新實時微控制器系列優特點封裝設計
- 11-26新款四維圖艙行泊一體單芯片SoC解決方案
- 11-26Easy1B/2B系列功率模塊優勢特點及應用
- 11-26EiceDriver系列柵極驅動芯片的研究與應用

 公網安備44030402000607
公網安備44030402000607





