
相機整體掃描
發布時間:2017/4/25 21:48:20 訪問次數:504
一些艦載、車載的光電搜索跟蹤一體化的設備(IRST)采用了傳感頭整體掃描搜索的工作模式,傳感頭內通常裝載了多種不同工作波段的傳感器組件,M24128-BWMN6P由于各個傳感器光學系統相對獨立,這類光電系統稱之為多孔徑系統。
傳感頭可以繞相互正交的方位軸、俯仰軸做整體旋轉或擺動,可以改變各個傳感組件共同的視軸的空間指向,實現大空域范圍的二維搜索。這種掃描方式對系統光學像質的影響最小,不需要結構龐大的擺鏡,也不會產生像旋。
全方位光電搜索設備一般采用長線列探測器并掃,如果傳感頭只做勻速旋轉不擺動,線視場在空域平掃,形成360°的掃描帶。掃描帶的寬度即為線列探測器所對應的光學視場。如果傳感頭在方位旋轉的同時,俯仰方向也同步地線性擺動,則可形成螺旋狀的掃描帶,覆蓋更大的俯仰空域,如圖3-67所示。
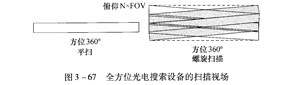
圖3-67全方位光電搜索設備的掃描視場
光學傳感頭整體旋轉、擺動掃描需要驅動機械慣量極大的傳感頭。另外,由于探測器也隨之旋轉,如要求全方位搜索,傳感頭的工作電源、控制信號和探測器輸出信號都必須通過滑環(導流環)進出。
傳感頭整體旋轉、擺動掃描的最大好處是無像旋,即線列或面陣傳感器看到的空間像是不旋轉的。
一些艦載、車載的光電搜索跟蹤一體化的設備(IRST)采用了傳感頭整體掃描搜索的工作模式,傳感頭內通常裝載了多種不同工作波段的傳感器組件,M24128-BWMN6P由于各個傳感器光學系統相對獨立,這類光電系統稱之為多孔徑系統。
傳感頭可以繞相互正交的方位軸、俯仰軸做整體旋轉或擺動,可以改變各個傳感組件共同的視軸的空間指向,實現大空域范圍的二維搜索。這種掃描方式對系統光學像質的影響最小,不需要結構龐大的擺鏡,也不會產生像旋。
全方位光電搜索設備一般采用長線列探測器并掃,如果傳感頭只做勻速旋轉不擺動,線視場在空域平掃,形成360°的掃描帶。掃描帶的寬度即為線列探測器所對應的光學視場。如果傳感頭在方位旋轉的同時,俯仰方向也同步地線性擺動,則可形成螺旋狀的掃描帶,覆蓋更大的俯仰空域,如圖3-67所示。
圖3-67全方位光電搜索設備的掃描視場
光學傳感頭整體旋轉、擺動掃描需要驅動機械慣量極大的傳感頭。另外,由于探測器也隨之旋轉,如要求全方位搜索,傳感頭的工作電源、控制信號和探測器輸出信號都必須通過滑環(導流環)進出。
傳感頭整體旋轉、擺動掃描的最大好處是無像旋,即線列或面陣傳感器看到的空間像是不旋轉的。
上一篇:二維指向鏡
上一篇:相機整體掃描的一種改進方法
 相關技術資料
相關技術資料- 5-29測量互感器繞組的絕緣電阻的目的是什么,測量有什么要求?
- 5-2目標自動截獲
- 4-25相機整體掃描
 公網安備44030402000607
公網安備44030402000607





