
PIC17C756AT-16/L 雙穩態的概念
發布時間:2019/10/14 13:28:37 訪問次數:2299
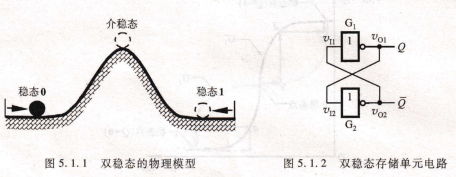
PIC17C756AT-16/L為了建立雙穩態的概念,可用圖5.1.1所示的物理模型來進行模擬。模型的主體為一峰形物。另用一小球的位置來表示兩種穩態(0,1)和一種介穩態①(峰頂)。若小球原處在左邊的穩態,設在它的左側施加沖擊力,它將越過峰頂的介穩態而進入右邊的另一穩態。反之,此時若在小球的右側施加一反向的沖擊力,小球又將回復到原來的穩態。顯然,每次要改變小球狀態時,所施加的沖擊力必須足夠大,否則小球不能越過介穩態的位置,又會返回到原來狀態。利用這一簡單的模型可以形象地模擬雙穩態及其在兩種穩定狀態間的變化。
雙穩態存儲單元電路
電路結構,將兩個非門G1和G2接成圖5.1.2所示的交叉耦合形式,則構成最基本的雙穩態電路。下面將從邏輯和模擬兩個角度對其特性和行為進行分析。
邏輯狀態分析,從電路的邏輯關系可知,若o=0,由于非門G2的作用,則使Q=1,Q
反饋到G1輸人端,又保證了Q=0。由于兩個非門首尾相接的邏輯鎖定,因而電路能自行保持在Q=0,口=1的狀態,形成第一種穩定狀態。反之,若0=1,則口=0,形成第二種穩定狀態。在兩種穩定狀態中,輸出端Q和口總是邏輯互補的。因為電路只存在這兩種可以長期保持的穩定狀態,故稱為雙穩態存儲單元電路,簡稱雙穩態電路。可以定義O=0為電路的0狀態,而當0=1時則為1狀態。電路接通電源后,可能隨機進入其中一種狀態,并能長期保持不變,因此,電路具有存儲或記憶1位二進制數據的功能。因為沒有控制信號輸入,所以無法確定圖5.1,2所示電路在上電時究竟進人哪一種狀態,也無法在運行中改變它的狀態。
“介穩”一詞系由metastable譯出。
PIC17C756AT-16/L為了建立雙穩態的概念,可用圖5.1.1所示的物理模型來進行模擬。模型的主體為一峰形物。另用一小球的位置來表示兩種穩態(0,1)和一種介穩態①(峰頂)。若小球原處在左邊的穩態,設在它的左側施加沖擊力,它將越過峰頂的介穩態而進入右邊的另一穩態。反之,此時若在小球的右側施加一反向的沖擊力,小球又將回復到原來的穩態。顯然,每次要改變小球狀態時,所施加的沖擊力必須足夠大,否則小球不能越過介穩態的位置,又會返回到原來狀態。利用這一簡單的模型可以形象地模擬雙穩態及其在兩種穩定狀態間的變化。
雙穩態存儲單元電路
電路結構,將兩個非門G1和G2接成圖5.1.2所示的交叉耦合形式,則構成最基本的雙穩態電路。下面將從邏輯和模擬兩個角度對其特性和行為進行分析。
邏輯狀態分析,從電路的邏輯關系可知,若o=0,由于非門G2的作用,則使Q=1,Q
反饋到G1輸人端,又保證了Q=0。由于兩個非門首尾相接的邏輯鎖定,因而電路能自行保持在Q=0,口=1的狀態,形成第一種穩定狀態。反之,若0=1,則口=0,形成第二種穩定狀態。在兩種穩定狀態中,輸出端Q和口總是邏輯互補的。因為電路只存在這兩種可以長期保持的穩定狀態,故稱為雙穩態存儲單元電路,簡稱雙穩態電路。可以定義O=0為電路的0狀態,而當0=1時則為1狀態。電路接通電源后,可能隨機進入其中一種狀態,并能長期保持不變,因此,電路具有存儲或記憶1位二進制數據的功能。因為沒有控制信號輸入,所以無法確定圖5.1,2所示電路在上電時究竟進人哪一種狀態,也無法在運行中改變它的狀態。
“介穩”一詞系由metastable譯出。
 相關技術資料
相關技術資料- 11-23模擬和混合信號平臺Treo詳情
- 11-23PXI和LXI模塊化解決方案解讀
- 11-23AN-13-0004_CAN收發器結構參數特點應用設計
- 11-23屏蔽柵槽溝技術 (SGT)主要特性及功能應用
- 11-23第一代SGT MOSFET系列技術結構參數封裝
- 11-23全球首顆GSE DPU芯片發布
- 11-22新一代5G-A模組RG650V-NA結構技術參數應用及需求分析
- 11-22電池儲能系統 (BESS)結構設計及解決方案
- 11-22全新高脈沖制動電阻系列參數技術應用設計
- 11-22Telcordia GR-468 CORE測試應用全
- 11-22DSP(數字信號處理器)系列介紹
- 11-22AI ISP的技術優勢和市場發展趨勢
熱門點擊
- 基于FTU的饋線自動化系統構成
- 基于FTU的饋線自動化系統的功能
- A/D轉換器的每一個測量過程分為自動穩零
- 電網故障相的對地電容的放電波
- 實驗數據分析結果
- 重合器的應用場合
- 在信息傳輸過程中會出現各種干擾
- 問答式通信規約又稱為Polhg規約
- P487A06信息圖表:不同類
- 按照不同的分類標準,重合器有如
推薦技術資料

- 循線機器人是機器人入門和
- 循線機器人是機器人入門和比賽最常用的控制方式,E48S... [詳細]
 公網安備44030402000607
公網安備44030402000607





