
PEBZ086N 三相力矩異步電動機
發布時間:2019/12/3 17:38:57 訪問次數:2794
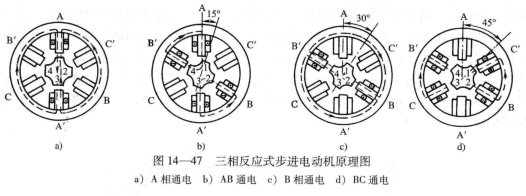
PEBZ086N當z=4時,三相反應式步進電動機原理如圖14-47所示。設A相通電時,齒1、3與A-A′對齊,如圖14-47a所示。當采用三相單二拍通電方式,即采用A-B-C-A通電方式時,每輸入一個脈沖,轉子順時針方向轉過30°角,完成三拍轉子轉過一個齒距角α=360/z=90°。如果改為三相雙三拍通電方式,即采用AB-BC-CA-AB通電方式,同樣每輸入一個脈沖,轉子順時針轉過30°角,完成三拍轉子轉過90°角。如果改為三相六拍通電方式,即采用A-AB-B-BC-C-CA-A通電方式,則每完成一拍,轉子轉過15°,六拍完成后正好轉過一個齒距角90°。若要減小齒距角,只需增加齒數即可。同時,定子磁極每極也可制為多齒,并保證定子、轉子齒距角相等。若通電拍數為m,脈沖頻率為r,則齒距角α=360/z,步距角q=a/m,轉子轉速為
n=60f/mz(r/min)。如z=40,則α=9°,三拍通電時,q=3度;六拍通電時,q=1.5度。步進電動機結構簡單,維護方便,運轉靈活,調速范圍大,步距角不受電壓和負載的影響,其角位移誤差不會長期積累,轉速只決定于脈沖頻率,因此廣泛應用于數控系統中。
力矩電動機 力矩電動機是一種高轉矩、低轉速并可長期處于堵轉狀態運行的電動機。
三相力矩異步電動機,結構特點 定子磁極對數多,繞組匝數多,以利降低轉速和減小堵轉電流。轉子采用高電阻率的黃銅制成籠形或用實體鋼制成,以利低轉速和高轉矩運行。由于發熱嚴重,力矩較大的電動機裝有獨立的鼓風機作強迫通風之用。
用途 可用于造紙機、紡織機械、軋鋼機等,還用于閥門的啟閉、機床的分度和裝夾、進給。在恒轉矩負載系統中可采用調壓調速。
直流力矩電動機,結構特點 如圖14-48所示,一般做成扁平圓盤狀。定子用軟磁材料制成,有槽圓環,槽中嵌入永久磁鋼。電樞長度與直徑之比一般為1:5左右,可直接裝在被驅動的軸上。電刷位置可按要求進行調節。
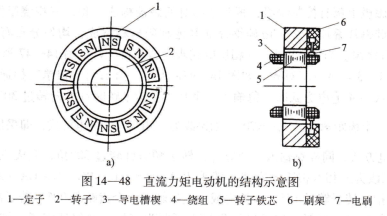
用途 廣泛用于位置伺服系統和速度伺服系統中,如雷達天線、天文望遠鏡的傳動,某些高精度機床中的傳動。在運行中電樞電流不得超過峰值電流,以免造成磁鋼去磁、轉矩下降。取出轉子時,定子必須用磁短路環保磁。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
PEBZ086N當z=4時,三相反應式步進電動機原理如圖14-47所示。設A相通電時,齒1、3與A-A′對齊,如圖14-47a所示。當采用三相單二拍通電方式,即采用A-B-C-A通電方式時,每輸入一個脈沖,轉子順時針方向轉過30°角,完成三拍轉子轉過一個齒距角α=360/z=90°。如果改為三相雙三拍通電方式,即采用AB-BC-CA-AB通電方式,同樣每輸入一個脈沖,轉子順時針轉過30°角,完成三拍轉子轉過90°角。如果改為三相六拍通電方式,即采用A-AB-B-BC-C-CA-A通電方式,則每完成一拍,轉子轉過15°,六拍完成后正好轉過一個齒距角90°。若要減小齒距角,只需增加齒數即可。同時,定子磁極每極也可制為多齒,并保證定子、轉子齒距角相等。若通電拍數為m,脈沖頻率為r,則齒距角α=360/z,步距角q=a/m,轉子轉速為
n=60f/mz(r/min)。如z=40,則α=9°,三拍通電時,q=3度;六拍通電時,q=1.5度。步進電動機結構簡單,維護方便,運轉靈活,調速范圍大,步距角不受電壓和負載的影響,其角位移誤差不會長期積累,轉速只決定于脈沖頻率,因此廣泛應用于數控系統中。
力矩電動機 力矩電動機是一種高轉矩、低轉速并可長期處于堵轉狀態運行的電動機。
三相力矩異步電動機,結構特點 定子磁極對數多,繞組匝數多,以利降低轉速和減小堵轉電流。轉子采用高電阻率的黃銅制成籠形或用實體鋼制成,以利低轉速和高轉矩運行。由于發熱嚴重,力矩較大的電動機裝有獨立的鼓風機作強迫通風之用。
用途 可用于造紙機、紡織機械、軋鋼機等,還用于閥門的啟閉、機床的分度和裝夾、進給。在恒轉矩負載系統中可采用調壓調速。
直流力矩電動機,結構特點 如圖14-48所示,一般做成扁平圓盤狀。定子用軟磁材料制成,有槽圓環,槽中嵌入永久磁鋼。電樞長度與直徑之比一般為1:5左右,可直接裝在被驅動的軸上。電刷位置可按要求進行調節。
用途 廣泛用于位置伺服系統和速度伺服系統中,如雷達天線、天文望遠鏡的傳動,某些高精度機床中的傳動。在運行中電樞電流不得超過峰值電流,以免造成磁鋼去磁、轉矩下降。取出轉子時,定子必須用磁短路環保磁。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
 相關技術資料
相關技術資料- 11-28最新集成傳感激光測距模塊規格參數技術應用
- 11-28Supermicro NVIDIA HGX B200系統參數應用設
- 11-28新一代 ToF 激光測距傳感器詳細探討
- 11-28全新 Riedon™ 功率電阻產品系列
- 11-28分流電阻的檢測原理及市場格局
- 11-28前沿技術AI輔助診斷應用新進展
- 11-2712位模數轉換器 (ADC)參數特點技術封裝
- 11-27三角函數加速器 (TMU)系列
- 11-27單芯片“艙行泊”一體化方案探究
- 11-27CoolSiC肖特基二極管技術參數應用設計
- 11-27納微GaN Safe系列NV6515(650V,32mΩ max)IC
- 11-27臨界導通模式(CrM)詳情
 公網安備44030402000607
公網安備44030402000607





