
高邊檢測電阻和復雜交流電阻LED負載的LED驅動器
發布時間:2021/12/10 13:29:24 訪問次數:904
動態電源控制允許器件為單節鋰電池充電,并同時為系統供電。該芯片可調節用于4.2V鋰電池的電池充電流和電壓,電池充電電流可通過編程達到最高1.6V。
芯片上內置的三個開關為系統負載提供動態電源供應。當系統負載超過輸入電源提供的輸入電流時,AAT3672可由電池提供附加電流。該芯片可自動管理電源、電池和系統之間的電能分配,在同步支持所有電能需求的同時,以盡可能多的電流為電池充電。
這一SoC由一個STP可編程硬件引擎、2通道PCI Express、一個DDR2存儲器接口以及其他器件組成,所有都集成到一個單芯片上。

Middlebrook的方法中列出的實際信號注入位置并不常用,但經過多年的調整,得出了常用注入位置。
此外,帶有高邊檢測電阻和復雜交流電阻LED負載的LED驅動器,在反饋路徑中應有一個不同于目前的注入點或Middlebrook最初建議的注入點,LTspice此前未予說明。
標準開關調節器控制環路波德圖產生三個關鍵測量值,用于確定穩定性和速度:
相位裕量
交越頻率(帶寬)
增益裕量
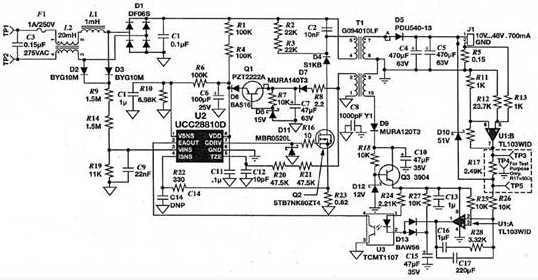
適當的控制環路相位和增益測量應由擁有(昂貴的)設備和相應經驗的工廠專家進行。如果缺少其中一個或兩個都沒有,則還有另一種選擇。
一種選擇是構建LED驅動器,查看它瞬態的響應。瞬態響應觀察需要應用板和更常見的臺式設備。瞬態分析的結果缺乏波德圖基于頻率的增益和相位數據——可用于保證穩定性,也可作為一般控制環路穩定性和速度的指示器。
這有助于大致了解控制環路的穩定性,以便開始選擇補償元件和確定輸出電容大小。
(素材來源:eccn.如涉版權請聯系刪除。特別感謝)
動態電源控制允許器件為單節鋰電池充電,并同時為系統供電。該芯片可調節用于4.2V鋰電池的電池充電流和電壓,電池充電電流可通過編程達到最高1.6V。
芯片上內置的三個開關為系統負載提供動態電源供應。當系統負載超過輸入電源提供的輸入電流時,AAT3672可由電池提供附加電流。該芯片可自動管理電源、電池和系統之間的電能分配,在同步支持所有電能需求的同時,以盡可能多的電流為電池充電。
這一SoC由一個STP可編程硬件引擎、2通道PCI Express、一個DDR2存儲器接口以及其他器件組成,所有都集成到一個單芯片上。
Middlebrook的方法中列出的實際信號注入位置并不常用,但經過多年的調整,得出了常用注入位置。
此外,帶有高邊檢測電阻和復雜交流電阻LED負載的LED驅動器,在反饋路徑中應有一個不同于目前的注入點或Middlebrook最初建議的注入點,LTspice此前未予說明。
標準開關調節器控制環路波德圖產生三個關鍵測量值,用于確定穩定性和速度:
相位裕量
交越頻率(帶寬)
增益裕量
適當的控制環路相位和增益測量應由擁有(昂貴的)設備和相應經驗的工廠專家進行。如果缺少其中一個或兩個都沒有,則還有另一種選擇。
一種選擇是構建LED驅動器,查看它瞬態的響應。瞬態響應觀察需要應用板和更常見的臺式設備。瞬態分析的結果缺乏波德圖基于頻率的增益和相位數據——可用于保證穩定性,也可作為一般控制環路穩定性和速度的指示器。
這有助于大致了解控制環路的穩定性,以便開始選擇補償元件和確定輸出電容大小。
(素材來源:eccn.如涉版權請聯系刪除。特別感謝)
 相關技術資料
相關技術資料- 11-25全新 Riedon高功率厚膜電阻 PFS35 系列
- 11-25業界首款300mm(12英寸)碳化硅襯底
- 11-253Dblox技術A16 1.6nm工藝簡述
- 11-25快速開關場效應晶體管優勢及關鍵技術
- 11-25精密分流電阻器和電流觀察電阻器(CVR)優特點
- 11-25新型IsoVu隔離電流探頭應用詳情
- 11-23模擬和混合信號平臺Treo詳情
- 11-23PXI和LXI模塊化解決方案解讀
- 11-23AN-13-0004_CAN收發器結構參數特點應用設計
- 11-23屏蔽柵槽溝技術 (SGT)主要特性及功能應用
- 11-23第一代SGT MOSFET系列技術結構參數封裝
- 11-23全球首顆GSE DPU芯片發布

 公網安備44030402000607
公網安備44030402000607





