
多變定位算法
發布時間:2012/3/31 19:32:12 訪問次數:2290
在具體迭代過程中,UAF05-12304-1501未知節點會根據周圍信標節點的不同分布選擇相應的多變定位算法計算自身位置。
(1)原子多邊算法
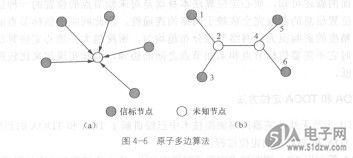
原子多邊( Atomic Multilateration)箅法適用于當未知節點周圍至少有3個信標節點的情況,如圖4-6 (a)所示,這里的信標節點是指原始信標節點,而非未知節點轉化的信標節點。此時,利用多邊極大似然估計法計算未知節點的坐標。
(2)迭代多邊算法
迭代多邊(Iterative Multilateration)算法是完全分布式的,可以運行在網絡的每個節上,同時也可以在一個單獨的中心節點或者簇頭等集中節點上運行。當在集中式情況下,該算法以代表網絡連通性的圖G為基礎進行操作計算,邊的權重代表節點間的距離,首先利用原子多邊算法計算周圍信標節點最多的未知節點的位置,未知節點轉換成信標節點,為了獲得更好精度和較快的收斂性;然后依然優先利用多邊極大似然估計法計算周圍信標節點數量最多的其余未知節點的坐標位置,但是這里的信標節點包括由未知節點轉化的信標節點。在分布式情況下,當未知節點獲取了3個信標節點的信息就可以利用三邊定位法進行本身位置的計算。該算法的一個弱點是在計算過程中使用轉化后的信標節點的位置信息,容易產生誤差積累。同時該系統使用基于TDOA技術測距精度高,從一定程度上減小了誤羞。
(3)協作多邊算法
協作多邊(Collaborative Multilateration)算法適用于網絡節點密度低的地方。當多次迭代定位后,網絡中仍然存在部分未知節點,它們周圍信標節點不足3個,此時必須通過其他節點進行協作定位。如圖4—6(b)所示,經過多次迭代后未知節點2和4周圍依然不能達到3個信標節點,此時節點2需要通過節點4計算到信標節點5和6的多跳距離,再利用極大似然估計法計算自身坐標。
總體來講,AHLos算法在迭代過程中存在誤差積累問題,對網絡節點密度要求高,不適合大規模無線傳感器網絡。基于TDOA的測距技術對硬件要求高,具有測距誤差小,精度高的優點。
在具體迭代過程中,UAF05-12304-1501未知節點會根據周圍信標節點的不同分布選擇相應的多變定位算法計算自身位置。
(1)原子多邊算法
原子多邊( Atomic Multilateration)箅法適用于當未知節點周圍至少有3個信標節點的情況,如圖4-6 (a)所示,這里的信標節點是指原始信標節點,而非未知節點轉化的信標節點。此時,利用多邊極大似然估計法計算未知節點的坐標。
(2)迭代多邊算法
迭代多邊(Iterative Multilateration)算法是完全分布式的,可以運行在網絡的每個節上,同時也可以在一個單獨的中心節點或者簇頭等集中節點上運行。當在集中式情況下,該算法以代表網絡連通性的圖G為基礎進行操作計算,邊的權重代表節點間的距離,首先利用原子多邊算法計算周圍信標節點最多的未知節點的位置,未知節點轉換成信標節點,為了獲得更好精度和較快的收斂性;然后依然優先利用多邊極大似然估計法計算周圍信標節點數量最多的其余未知節點的坐標位置,但是這里的信標節點包括由未知節點轉化的信標節點。在分布式情況下,當未知節點獲取了3個信標節點的信息就可以利用三邊定位法進行本身位置的計算。該算法的一個弱點是在計算過程中使用轉化后的信標節點的位置信息,容易產生誤差積累。同時該系統使用基于TDOA技術測距精度高,從一定程度上減小了誤羞。
(3)協作多邊算法
協作多邊(Collaborative Multilateration)算法適用于網絡節點密度低的地方。當多次迭代定位后,網絡中仍然存在部分未知節點,它們周圍信標節點不足3個,此時必須通過其他節點進行協作定位。如圖4—6(b)所示,經過多次迭代后未知節點2和4周圍依然不能達到3個信標節點,此時節點2需要通過節點4計算到信標節點5和6的多跳距離,再利用極大似然估計法計算自身坐標。
總體來講,AHLos算法在迭代過程中存在誤差積累問題,對網絡節點密度要求高,不適合大規模無線傳感器網絡。基于TDOA的測距技術對硬件要求高,具有測距誤差小,精度高的優點。
上一篇:TOA和TDOA定位方法
上一篇:AOA定位算法
 相關IC型號
相關IC型號- UAF05-12304-1501
- 暫無最新型號

 公網安備44030402000607
公網安備44030402000607





