
單片機版光立方的制作
發布時間:2013/11/23 21:16:58 訪問次數:10440
N視頻: http://v.youku.comN_showid_XNDlwMzM5NjE2.html
下面,就把我的設計原理和程序與大家共同分享一下。FM08A125V1/8A本人能力有限叨一句:我們的作品堅持原創、堅持開源,教學性轉載請注明出處難免有不足之處,還請讀者指正!在開始前,我還是要多嘮作品包含的程序、原理圖不得用于商業用途。
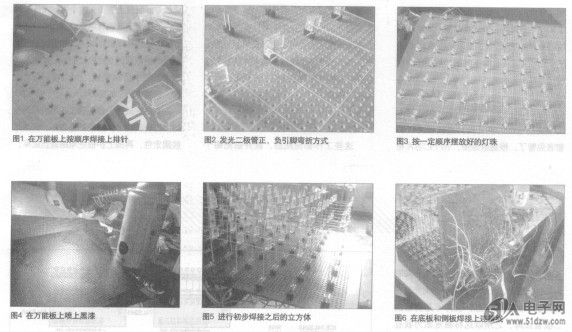
制作立方體最大的工作量在于燈珠的焊接,恐帕大家對51 2個燈珠的焊接都心存顧慮,這次我特意解決了這個問題,燈珠的焊接不僅有了速度,而且有質量保證,方法如圖1所示。
用一張18cm×30cm的萬能板,上面焊接間距為2.54mm的排針,橫向間距孔數是7個,縱向間距孔數是8個,這樣焊接出來的8x8點陣燈珠的間距就都是8個了。這種方法適用于長方形燈珠,如果是普通型的燈珠,改為間距較大的排針就可以了。間距也需要做適當調整,為了保證橫向和縱向燈珠的間距一致,橫向和縱向的排針間距是不一樣的,模板做好后,用法如圖2所示。

橫向彎折的是發光二極管的負極,縱向彎曲的是正極。為了便于焊接,縱向的引腳彎折了兩次,即橫向一次(與負極一致),再縱向彎折(彎折點大約在3mm處,不同廠商的燈珠略有差異,以實際模板比對為準)一次。之所以讓正極做縱向彎折,是因為發光二極管的正極引腳都要比負極引腳長一些,這樣就不會因為彎折兩次而導致引腳長度不足。當然,我是最大限度地發揮了引腳的長度優勢,讀者可以根據自己的實際情況來決定燈珠的間距。
擺放好的燈珠如圖3所示。這樣擺放后,燈珠的引腳都是緊挨在一起的,幾乎不需要人為矯正,直接上焊錫就可以了。因為引腳的擺放狀態都是適合焊接的,所從焊接起來非常方便,保證沒有虛焊。這種模板下做出來的點陣是非常結實的,一般來說,當焊接好后的點陣用鑷子小心地取下來時,你會發現取下來的平面都是橫平豎直的。如果偶然出現彎曲的點陣面,可以直接用手做矯形,不需要擔心點陣會被弄壞。我的實際經驗告訴我,這種方法焊接出來的點陣,只要在焊接上不馬虎,絕對結實;只要焊錫夠均勻,也不會出現開焊點。
N視頻: http://v.youku.comN_showid_XNDlwMzM5NjE2.html
下面,就把我的設計原理和程序與大家共同分享一下。FM08A125V1/8A本人能力有限叨一句:我們的作品堅持原創、堅持開源,教學性轉載請注明出處難免有不足之處,還請讀者指正!在開始前,我還是要多嘮作品包含的程序、原理圖不得用于商業用途。
制作立方體最大的工作量在于燈珠的焊接,恐帕大家對51 2個燈珠的焊接都心存顧慮,這次我特意解決了這個問題,燈珠的焊接不僅有了速度,而且有質量保證,方法如圖1所示。
用一張18cm×30cm的萬能板,上面焊接間距為2.54mm的排針,橫向間距孔數是7個,縱向間距孔數是8個,這樣焊接出來的8x8點陣燈珠的間距就都是8個了。這種方法適用于長方形燈珠,如果是普通型的燈珠,改為間距較大的排針就可以了。間距也需要做適當調整,為了保證橫向和縱向燈珠的間距一致,橫向和縱向的排針間距是不一樣的,模板做好后,用法如圖2所示。
橫向彎折的是發光二極管的負極,縱向彎曲的是正極。為了便于焊接,縱向的引腳彎折了兩次,即橫向一次(與負極一致),再縱向彎折(彎折點大約在3mm處,不同廠商的燈珠略有差異,以實際模板比對為準)一次。之所以讓正極做縱向彎折,是因為發光二極管的正極引腳都要比負極引腳長一些,這樣就不會因為彎折兩次而導致引腳長度不足。當然,我是最大限度地發揮了引腳的長度優勢,讀者可以根據自己的實際情況來決定燈珠的間距。
擺放好的燈珠如圖3所示。這樣擺放后,燈珠的引腳都是緊挨在一起的,幾乎不需要人為矯正,直接上焊錫就可以了。因為引腳的擺放狀態都是適合焊接的,所從焊接起來非常方便,保證沒有虛焊。這種模板下做出來的點陣是非常結實的,一般來說,當焊接好后的點陣用鑷子小心地取下來時,你會發現取下來的平面都是橫平豎直的。如果偶然出現彎曲的點陣面,可以直接用手做矯形,不需要擔心點陣會被弄壞。我的實際經驗告訴我,這種方法焊接出來的點陣,只要在焊接上不馬虎,絕對結實;只要焊錫夠均勻,也不會出現開焊點。
上一篇:驅動板的設計
 相關技術資料
相關技術資料- 11-23單片機版光立方的制作
- 相關IC型號
- FM08A125V1/8A
- FM0801-A1
熱門點擊
- 六進制計數器電路
- 單片機版光立方的制作
- 帶中間抽頭的全波整流器
- 串聯RL電路的阻抗和相角
- 用Arduino驅動觸摸屏
- RC倔置和耦合電路中交直流電壓的疊加
- 串聯RL電路中的電壓
- 電容器中的功率
- 新車間Arduino圖形化編程軟件
- RoboPeak帶來的機器人平臺與投影鍵盤
推薦技術資料
- 單片機版光立方的制作
- N視頻: http://v.youku.comN_sh... [詳細]
 公網安備44030402000607
公網安備44030402000607





