
三角法測量原理
發布時間:2016/2/16 19:34:39 訪問次數:2138
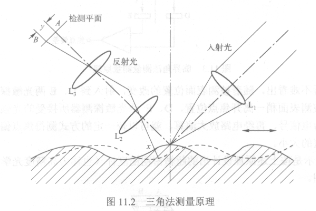
那么工件表面相對原來的位置在垂直表面方向有一個位移x,反射到檢測平面的光點就從點移到曰點。點和B點的距離為少,根據光學三角原理,有如下關系:D0808
y= 2mx sin oi (11.15)
式中,m為透鏡放大系數,01為入射角。根據需要,m可等于l或其他數值。此處m-l,并取臼1= 45.
當x較小,保證在檢測透鏡的焦深范圍內時,y與x呈線性關系由式( 11.16)可知,如果我們設法探測到反射光點的位置變化y,則工件表面輪廓高度的變化量x就可得到。若在檢測平面放置一個直徑為3 mm呈對半形分布的接收光纖束,該光纖束的兩個分支經光纖耦合連接頭分別接到兩個光電二極管上,這兩個光電二極管的輸出端分別接到一個高阻抗型差分放大器的同相輸入端和反相輸入端。其后接低通濾波器,輸出一個正比于工件表面輪廓高度變化的電壓值,再經一個12位A/D變換器,由計算機采集并處理各種數據,最后得到工件的表面粗糙度值。
采用光點變位法在線測量表面粗糙度的優點是測量的精度較高,其缺點主要有儀器結構復雜,儀器調整木方便,測量范圍較小,并且測量速度也較慢。
那么工件表面相對原來的位置在垂直表面方向有一個位移x,反射到檢測平面的光點就從點移到曰點。點和B點的距離為少,根據光學三角原理,有如下關系:D0808
y= 2mx sin oi (11.15)
式中,m為透鏡放大系數,01為入射角。根據需要,m可等于l或其他數值。此處m-l,并取臼1= 45.
當x較小,保證在檢測透鏡的焦深范圍內時,y與x呈線性關系由式( 11.16)可知,如果我們設法探測到反射光點的位置變化y,則工件表面輪廓高度的變化量x就可得到。若在檢測平面放置一個直徑為3 mm呈對半形分布的接收光纖束,該光纖束的兩個分支經光纖耦合連接頭分別接到兩個光電二極管上,這兩個光電二極管的輸出端分別接到一個高阻抗型差分放大器的同相輸入端和反相輸入端。其后接低通濾波器,輸出一個正比于工件表面輪廓高度變化的電壓值,再經一個12位A/D變換器,由計算機采集并處理各種數據,最后得到工件的表面粗糙度值。
采用光點變位法在線測量表面粗糙度的優點是測量的精度較高,其缺點主要有儀器結構復雜,儀器調整木方便,測量范圍較小,并且測量速度也較慢。
 相關技術資料
相關技術資料- 2-16三角法測量原理
- 1-18把待檢測量變換為光信息脈沖量

 公網安備44030402000607
公網安備44030402000607





