
PlDХ{№қ№ҰДЬ
°lІј•rйg:2018/1/10 20:59:37 ФLҶ–ҙО”ө:1126
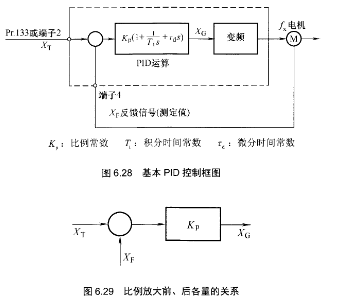
PIDҝШЦЖКЗй]ӯhҝШЦЖЦРөДТ»·NіЈТҠРОКҪЎЈ·ҙрҒРЕМ–ИЎЧФНП„УПөҪyөДЭ”іц¶Л,®”Э”іцN80C196KB16БҝЖ«лxЛщТӘЗуөДҪo¶ЁЦө•r,·ҙрҒРЕМ–іЙХэұИөШЧғ»ҜЎЈФЪЭ”Ил¶Л,Ҫo¶ЁРЕМ–Еc·ҙрҒРЕМ–ПаұИЭ^,ҙжФЪТ»ӮҖЖ«ІоЎЈҢҰФ“Ж«ІоЦө,ҪӣPIDХ{№қ,ЧғоlЖчНЁЯ^ёДЧғЖдЭ”іцоlВК,СёЛЩЎўңКҙ_өШПыіэНП„УПөҪyөДЖ«Іо,»ЦҸНөҪҪo¶ЁЦө,ХсКҺәНХ`Іо¶јұИЭ^РЎЎЈ
ҲD6.28ЛщКҫһй»щұҫPIDҝШЦЖҝтҲD,зсһйДҝҳЛРЕМ–,м№һй·ҙрҒРЕМ–,ЧғоlЖчЭ”іцоlВКөДҙуРЎУЙәПіЙРЕМ–ўШTм№)ӣQ¶ЁЎЈТ»·ҪГж,·ҙрҒРЕ̖칑ӘҹoПЮҪУҪьДҝҳЛРЕМ–м№;БнТ»·ҪГж,ЧғоlЖчөДЭ”іцоlВКҰ«УЦКЗУЙЫЯәНГ·ПаңpөДҪY№ыҒнӣQ¶ЁөД,ИзҲD6.29ЛщКҫЎЈ
һйБЛК№ЧғоlЖчЭ”іцоlВКҫSіЦТ»¶Ё,ҫНТӘЗуУРТ»ӮҖЕcҙЛПаҢҰ‘ӘөДҪo¶ЁРЕМ–Нм,Я@ӮҖҪo¶ЁРЕМ–јИРиТӘУРТ»¶ЁөДЦө,УЦТӘЕcПаВ“ПөЎЈ
PIDҝШЦЖКЗй]ӯhҝШЦЖЦРөДТ»·NіЈТҠРОКҪЎЈ·ҙрҒРЕМ–ИЎЧФНП„УПөҪyөДЭ”іц¶Л,®”Э”іцN80C196KB16БҝЖ«лxЛщТӘЗуөДҪo¶ЁЦө•r,·ҙрҒРЕМ–іЙХэұИөШЧғ»ҜЎЈФЪЭ”Ил¶Л,Ҫo¶ЁРЕМ–Еc·ҙрҒРЕМ–ПаұИЭ^,ҙжФЪТ»ӮҖЖ«ІоЎЈҢҰФ“Ж«ІоЦө,ҪӣPIDХ{№қ,ЧғоlЖчНЁЯ^ёДЧғЖдЭ”іцоlВК,СёЛЩЎўңКҙ_өШПыіэНП„УПөҪyөДЖ«Іо,»ЦҸНөҪҪo¶ЁЦө,ХсКҺәНХ`Іо¶јұИЭ^РЎЎЈ
ҲD6.28ЛщКҫһй»щұҫPIDҝШЦЖҝтҲD,зсһйДҝҳЛРЕМ–,м№һй·ҙрҒРЕМ–,ЧғоlЖчЭ”іцоlВКөДҙуРЎУЙәПіЙРЕМ–ўШTм№)ӣQ¶ЁЎЈТ»·ҪГж,·ҙрҒРЕ̖칑ӘҹoПЮҪУҪьДҝҳЛРЕМ–м№;БнТ»·ҪГж,ЧғоlЖчөДЭ”іцоlВКҰ«УЦКЗУЙЫЯәНГ·ПаңpөДҪY№ыҒнӣQ¶ЁөД,ИзҲD6.29ЛщКҫЎЈ
һйБЛК№ЧғоlЖчЭ”іцоlВКҫSіЦТ»¶Ё,ҫНТӘЗуУРТ»ӮҖЕcҙЛПаҢҰ‘ӘөДҪo¶ЁРЕМ–Нм,Я@ӮҖҪo¶ЁРЕМ–јИРиТӘУРТ»¶ЁөДЦө,УЦТӘЕcПаВ“ПөЎЈ
ЙПТ»ЖӘЈәЦұБчЦЖ„У
ЙПТ»ЖӘЈәPID„УЧчЯx“сЎЈ
 ПакPјјРgЩYБП
ПакPјјРgЩYБП- 5-1„У‘BЙсҪӣҝШЦЖПөҪyФOУӢјјРgТӘьc
- 1-22ХЖОХMM440ЧғоlЖчөД»щұҫ…ў”өЭ”Ил
- 1-10PlDХ{№қ№ҰДЬ
- 9-15В·УЙұнұШнҡ°ьә¬ТФПВИэн—ғИИЭ
ҹбйTьc“ф
- У|лҠҢҰИЛуwөДОЈәҰЦчТӘУРлҠӮыәНлҠ“фғЙ·N
- СbлpВ“ҝЙХ{лҠИЭЖч
- АУиFо^өДРЮХы
- ИэҳO№Ьмo‘BлҠүәЎўлҠБчөДңyФҮ
- оlВКМШРФөДңyФҮ
- јҜіЙлҠВ·өДәёҪУ
- ФЪРЕМ–ІЁөД°лЦЬЖЪғИ,PWMІЁөДГ}ӣ_ӮҖ”өІ»№М¶Ё
- °лҢ§уwИэҳO№ЬөД№ЬРНЕcлҠҳOЕР„e
- №вҝМTrackПөҪyөД·ВХжҢҚтһ
- лҠИЭЖчөД»щұҫҶОО»
НЖЛ]јјРgЩYБП
- »щңКлҠүәөДМṩ
- й_КјөД•rәтЈ¬ПлК№УГLM385Ччһй»щңКЈ¬HIN202EC... [Ф”јҡ]
- РВТ»ҙъ5G-AДЈҪMRG650V
- лҠіШғҰДЬПөҪy (BESS)ҪYҳӢ
- И«РВёЯГ}ӣ_ЦЖ„УлҠЧиПөБР…ў”өјјРg‘ӘУГФOУӢ
- Telcordia GR-46
- DSPЈЁ”өЧЦРЕМ–МҺАнЖчЈ©ПөБРҪй
- AI ISPөДјјРgғһ„ЭәНКРҲц°lХ№Ъ…„Э
- ¶аГҪуw…fМҺАнЖчSM501ФЪЗ¶ИлКҪПөҪyЦРөД‘ӘУГ
- »щУЪIEEE802.11bөДEPAңШ¶ИЧғЛНЖч
- QUICCEngineРВТэЗжНЖ„УIPҫWҪjёпРВ
- SoCГжКА°ЛДкәуөД®aҳIҷCУц
- MPC8xxПөБРМҺАнЖчөДЗ¶ИлКҪПөҪyлҠФҙФOУӢ
- dsPICј°ЖдФЪҪ»БчЧғоlХ{ЛЩЦРөД‘ӘУГСРҫҝ
 №«ҫW°ІӮд44030402000607
№«ҫW°ІӮд44030402000607





