
ЧФ„Ус{сӮЖыЬҮХэФЪҸДОҙҒнүфПлСЭЧғһй®”ҙъ¬FҢҚ
°lІј•rйg:2019/8/30 17:50:52 ФLҶ–ҙО”ө:2829
ЧФҸД20КАјo70Дкҙъй_КјЛгЖрЈ¬ЧФ„Ус{сӮПөҪyФЪҡWГАҮшјТТСҪӣЕоІӘ°lХ№УР50ДкЧуУТ•rйgЈ¬ёчҮшёч№«ЛҫёчёЯРЈй_°lіцФS¶аОе»Ё°ЛйTөДс{сӮЭoЦъ№ҰДЬЈ¬ШҪҙэПакPЦч№ЬІҝйTҷCҳӢҢҰЖд·Цјү·ЦоҗЎЈФЪЯ@ӮҖұіҫ°ПВЈ¬SAEЈЁГАҮшҷC„УЬҮ№ӨіМҺҹҢW•юЈ©әНNHTSAЈЁГАҮшёЯЛЩ№«В·°ІИ«№ЬАнҫЦЈ©іцЕ_БЛПакP·ЦјүҳЛңКЈ¬ТФSAE J316-2018һйАэЯMРРЦvҪвЈә
L0өДПөҪyјУңpЛЩәНЮDПт¶јКЗс{сӮҶTШ“ШҹЈ¬L1өДПөҪyјУңpЛЩ»тЮDПтЖдЦРТ»ӮҖКЗУЙПөҪyШ“ШҹЎЈL2өДПөҪyјУңpЛЩәНЮDПтҫщһйПөҪyШ“ШҹЈ¬ө«КЗПөҪy№ӨЧчөДЯ^іМЦРРиТӘс{сӮҶTЎ°ұO¶ҪЎұЈ¬ұШТӘ•rРиТӘс{сӮҶTЎ°јmХэЎұПөҪyөДІЩЧчЎЈL3өДПөҪyјУңpЛЩәНЮDПтҫщһйПөҪyШ“ШҹЈ¬№ӨЧчЯ^іМЦРТІІ»РиТӘс{сӮҶTЎ°ұO¶ҪЎұЈ¬ПөҪy•юЧФОТұO¶ҪЈ¬®”ПөҪyІ»ҝЙҝШ•rЈ¬МбКҫс{сӮҶTҝШЦЖЎЈL4өДПөҪyјУңpЛЩәНЮDПтЎўІ»РиТӘс{сӮҶTұO¶ҪЈ¬ПөҪy•юЧФОТұO¶ҪЈ¬ТІІ»РиТӘс{сӮҶTлS•rңКӮдҝШЦЖЈ¬З°МбКЗЦ»ДЬФЪІҝ·ЦУтК№УГЎЈL5өДПөҪyФЪL4»щөAЙПУЙІҝ·ЦУтМбЙэһйИ«ІҝУтЎЈ

ЧФ„Ус{сӮЖыЬҮХэФЪҸДОҙҒнүфПлСЭЧғһй®”ҙъ¬FҢҚЈ¬лSЦшјјРgіЙКмЈ¬ӮҖИЛәН№«№ІҪ»НЁҢўУАЯhЮDЧғЎЈЧоҪKЈ¬ҹoИЛс{сӮЖыЬҮҢўНкИ«ИЎҙъИЛоҗс{сӮҶTЈ¬өАВ·ЙПФЩТІӣ]УРОЈлUөДЎў»и»иУыЛҜөДЎўКЬӮыөДәН·ЦРДөДЛҫҷCЎЈ2017 ДкЈ¬ҪьЛДИfГАҮшИЛЛАУЪҪ»НЁКВ№КЈ¬“юГАҮшҮшјТ№«В·Ҫ»НЁ°ІИ«№ЬАнҫЦ (NHTSA) ·QЈ¬ЖдЦРјs 90ЈҘ өДКВ№ККЗИЛһйеeХ`ФміЙөДЎЈө«КЗЯ@н—јјРgұіәуөДФӯТтКЗЈ¬ҹoИЛс{сӮЖыЬҮҫҝҫ№ИзәОЧцөҪ°ІИ«Ј¬ТФј°ЯҖУР¶аҫГІЕДЬҹoРиҝҙВ·ҫНҝЙТФЙППВ°аЈҝ
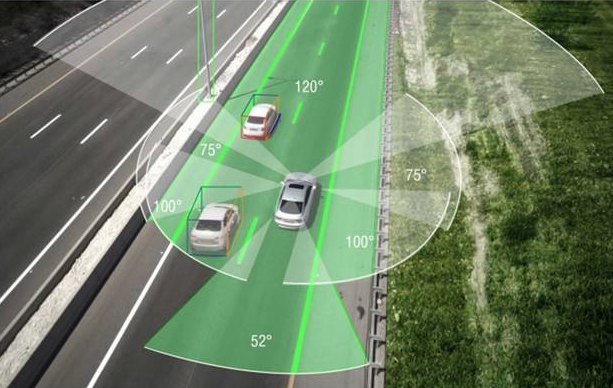
ИЛ№ӨЦЗДЬтҢ„УЧФ„Ус{сӮЖыЬҮһйБЛК№ЖыЬҮҫЯУРЧФЦчРФЈ¬РиТӘІ»”аБЛҪвЖдЦЬҮъӯhҫі - КЧПИЈ¬НЁЯ^ёРЦӘЈЁЧR„eРЕПўІўҢўЖд·ЦоҗЈ©Ј¬И»әуНЁЯ^ЬҮЭvөДЧФ„У/УӢЛгҷCҝШЦЖҢҰРЕПўІЙИЎРР„УЎЈЧФ„Ус{сӮЖыЬҮРиТӘ°ІИ«ЗТн‘‘ӘСёЛЩөДҪвӣQ·Ҫ°ёЈ¬Я@Р©ҪвӣQ·Ҫ°ёРиТӘДЬүтФ”јҡБЛҪвс{сӮӯhҫіЈ¬И»әуФЪҙЛ»щөAЙПЛІйgЧціцӣQІЯЎЈБЛҪвс{сӮӯhҫіРиТӘНЁЯ^ЖыЬҮЙПұҠ¶аІ»Н¬ӮчёРЖчІ¶«@ҙуБҝ”ө“юЈ¬И»әуУЙЬҮЭvөДЧФ„Ус{сӮУӢЛгҷCПөҪyМҺАнЎЈ
һйБЛК№ЬҮЭvДЬүтФЪҹoИЛҝШЦЖөДЗйӣrПВХжХэРРсӮЈ¬ұШнҡКЧПИҢҰИЛ№ӨЦЗДЬ (AI) ҫWҪjЯMРРҙуБҝЕаУ–Ј¬ТФБЛҪвИзәОІйҝҙЎўБЛҪвЛщҝҙөҪөДғИИЭЈ¬ІўҢҰИОәОҝЙТФПлөҪөДҪ»НЁ оӣrЧціцХэҙ_өДӣQІЯЎЈЧФ„Ус{сӮЖыЬҮөДУӢЛгРФДЬЕcТ»Р©ҪьҺЧДкІЕУРөДЧоёЯРФДЬЖҪЕ_Па®”

L3ҢУјүөДЧФ„Ус{сӮПөҪyТСҪӣНкИ«ИЎҙъс{сӮҶTөДІЩЧчЈ¬Ц»КЗФЪҫoјұІ»ҝЙҝШЗйӣrПВБфҪoс{сӮҶT6-8sТФЙПөД•rйgҪУ№ЬЬҮЭvјҙҝЙЎЈЯ@ӮҖ•rәтДгҝЙТФЧшФЪс{сӮО»ЙП·ЕпwЧФОТЈәНжКЦҷCЎўҝҙҲујҲЎўәИӮҖҝ§·ИЎўВ В Тфҳ·ЎўҝҙҝҙТ•оlЈ¬ө«КЗІ»ДЬЛҜУXЈ¬ТтһйТ»ө©с{сӮҶTЛҜЦшБЛПлФЪ6-8sғИ°СЛыә°РСІўДЬХэҙ_өДҝШЦЖЬҮЭvЯ@ҙ_ҢҚУРьcлyЈ¬ЛщТФПөҪyҪ^ҢҰКЗІ»ФКФSс{сӮҶTЛҜУXөДЎЈФЪПөҪyХэіЈ№ӨЧч•rТӘңКҙ_өДҷzңyЦЬЯ…ХПөKОпәНЬҮЭvЈ¬ФЪПөҪyДіТ»Бгјюіц¬F№КХП•rТІТӘА^АmХэіЈ№ӨЧчТ»¶О•rйgЧҢс{сӮҶTУРЧгүтөД•rйgҒнҪУ№ЬҝШЦЖЬҮЭvЎЈЯ@ҢҰУЪХыӮҖЧФ„Ус{сӮПөҪy¶шСФКЗТ»ӮҖҮАҫюөДҝјтһЈ¬ТӘұЈЧCФЪХыӮҖёРЦӘЎўӣQІЯәНҲМРРҢУГж¶јТӘУРИЯУаЎЈТФҠWөПA8 TJPһйАэЈә
ХыЬҮ¶аӮҖәБГЧІЁАЧЯ_Ўўі¬В•ІЁАЧЯ_ЎўЗ°Т•”zПсо^ЎўӯhТ•”zПсо^»ҘСaИЪәПәНИЯУаЈ¬іэЦРСлҝШЦЖҶОФӘЈЁzFASЈ©Ц®НвЈ¬З°әБГЧІЁАЧЯ_ФЪёРЦӘЗ°·ҪРЕПўЦ®НвТІ°зСЭіЙҫ«әҶ°жИЯУаҝШЦЖЖч№ҰДЬЎЈФЪҲМРРҢУГжУРЬҮЙн·Җ¶ЁПөҪyЈЁESCЈ©+ҫҖҝШЦЖ„УЦъБҰЖчЎўЗ°ЭҶЮDПт+әуЭҶЮDПт»ҘһйИЯУаЎЈ

ФЪL2ј°ТФПВс{сӮЭoЦъ№ҰДЬ•rЈ¬с{сӮІЩЧчөДЦчуwЯҖКЗИЛЈ¬ҝШЦЖөДҢҰПуҫНКЗЖыЬҮЈ¬ЛщТФТӘ°СұҫЬҮөДЯ\РР о‘BРЕПўп@КҫҪoс{сӮҶTЈ¬ҪӣөдУЙИЛҝШЦЖөДҪзГжөДп@КҫЦчТӘ·ҪКҪЈәЮDЛЩұнҲAұP+ЬҮЛЩұнҲAұPЎЈ¶шL3ПөҪyҝШЦЖөДЦчуwКЗЖыЬҮЈ¬ҙЛ•rИЛҹoРиЯMРРјУңpЛЩәНЮDПтҝШЦЖЈ¬ғxұнЦ»РиТӘп@КҫL3өДҝШЦЖ о‘BјҙҝЙЎЈ
ө«ҢҰУЪҫЯӮдL3өДПөҪyТӘҫЯӮдИэ·NІ»Н¬өДғxұнҪзГжЈәҪӣөдИЛҝШЦЖөДҪзГжЈ¬L3ҝШЦЖҪзГжЈ¬ҪӣөдИЛҝШЦЖөДҪзГж+L3ҝШЦЖҪзГжЈ¬ҢҰУЪҪӣөдИЛ+L3ҝШЦЖҪзГжУГНҫКЗКІГҙДШЈҝҫНКЗФЪПөҪyНЛіц»тИЛЦч„УҪУ№Ь•rғxұнјИТӘп@КҫL3ПөҪyҝШЦЖ о‘BәНЬҮЭvЯ\РР о‘BЈ¬ТФұЈЧCЭ^әГөДҢҚ¬FИЛҷCс{сӮөДЗР“QЎЈ
ОТӮғЧФјәй_ЬҮөДЯ^іМЦРҪӣіЈ•юУцөҪёч·NөДХыЬҮ®җіЈЗйӣrЈәИз№КХП•rЦъБҰЦұҪУНЛіцҢ§ЦВЮDІ»„У·ҪПтұPЈ¬ЦЖ„У®җіЈҢ§ЦВҹo„xЬҮЎЈИЛй_ЬҮөДЯ^іМЦРіц¬FөДЯ@Р©ҫoјұЗйӣrЯҖҝЙТФІЙИЎёч·NҫoјұҙлК©ұЬлUЈ¬ө«КЗҢҰУЪL3ПөҪyс{сӮҶTОҙЧўТ•З°·ҪОҙКЦ·ц·ҪПтұPЈ¬№ҰДЬҝШЦЖЦұҪУНЛіцКЗ·ЗіЈТӘГьөДЈ¬ПөҪy№©‘ӘЙМТӘіР“ъИ«ІҝШҹИОЎЈ
ҸДL2өҪL3өДМшЬSЈ¬К№ЖыЬҮХЖҝШҷаУЙИЛЮDТЖөҪҷCЖчЈ¬лyФЪДДАпЈҝАоөВТгЦёіцБЛИэьcЈәЧФ„Ус{сӮөИјүЮD“QьcИзәО№АБҝЈҝХЖҝШҷаҪ»ҪУьcИзәО¶ИБҝЈҝХЖҝШҷаҪ»ҪУЯ^іМЦРөДКВ№КИзәО¶ИБҝЈҝ
Ў°ИЛТСҪӣ°СЖыЬҮАпөДЧФ„УҝШЦЖЧцөҪБЛҳOЦВЈ¬Н¬•rТІУ|ЕцөҪБЛЧФ„У»ҜөДМм»Ё°еЈ¬ПВТ»ІҪРиТӘТАҝҝИЛ№ӨЦЗДЬҒнНкіЙЎЈЎұАоөВТгХfЎЈТІҫНКЗХfЈ¬ЧФ„Ус{сӮ°lХ№ТӘПлЯMлAЈ¬ЖдЦРЧоҝЙДЬөДҪвӣQВ·ҸҪКЗИЛ№ӨЦЗДЬЎЈ
КВҢҚЙПЈ¬ДҝЗ°І»ЙЩЖуҳI¶јдXҰУЦғҰУГИЛ№ӨЦЗДЛGлHхКөПЦёёЯјү„eөДЧФ„Ус{сӮЎЈФЪҙЛЯ^іМЦРЈ¬ИЛ№ӨЦЗДЬЦрқuұ»ХJһйКЗҢҚ¬FЧФ„Ус{сӮЖыЬҮөДкPжIЛщФЪЈ¬КЗНЖ„УЧФ„Ус{сӮЙМҳI»ҜөДәЛРДЎЈ

ИЛ№ӨЦЗДЬБўЧгУЪЎ°ҷCЖчҢWБ•ЎұЈ¬КЗҢўИЛоҗҢWБ•Я^іМЎ°Нв»ҜЎұЎЈЯx“сәПЯmөДДЈРНЈ¬ЧҢДЈРНҢWБ•ҳУұҫЈ¬ҸД¶шХТіц”ө“юөДғИФЪТҺВЙЈ¬ҸД¶шРОіЙҢҰОҙЦӘВ·ӣrөДЎ°ҪӣтһЎұЎЈКВҢҚЧCГчЈ¬ҷCЖчҢWБ•Ј¬ёьЙЖУЪҸДәЈБҝ”ө“юЦРійПуМбҹ’іцИфёЙУРғrЦөөДТтЛШЈ¬Н¬•rҙ_¶ЁТтЛШЦ®йgөДПакPРФЈ¬Іўҙ_Бў‘ӘҢҰІЯВФЎЈө«ұҫөШЛг·Ёҹo·ЁәӯЙwЛщУРВ·ӣrЈ¬ФOУӢХЯұШнҡЩxУиҹoИЛс{сӮПөҪyТ»¶ЁөДЧФЦчҷаЈ¬ұЬГвФЪМШКвВ·ӣrПВФ“ПөҪyІ»ЦӘЛщҙлЎЈ
АэИзЈ¬ФЪ№«В·ЙПҝмЛЩРРсӮөДс{сӮҶTЈ¬ҢҰН»И»Я`ТҺҷMҙ©сRВ·өДРРИЛИұ·ҰоAЖЪЈ¬¶шИЛ№ӨЦЗДЬТІәЬлyҸДҳУұҫЦРҢWөҪЈ¬ИзәОҢҰё¶Н»И»іц¬FөДХПөKЈҝ
АнХ“ЙПЈ¬ҹoИЛПөҪyөДӮчёРЖчұИИЛоҗс{сӮҶTёьФзөШ°l¬FЯ`ТҺРРИЛЎЈө«Из№ыРРИЛІЙИЎҝмЛЩұјЕЬЈ¬јУЛЩҸДЬҮЗ°кJЯ^өИІ»ГчЦЗөДЧц·ЁЎЈҙЛ•rјЩФO„xЬҮҫалxІ»үтЈ¬ЛҫҷCҢўЧуУТһйлyЈ¬јЩИзҢў„xЬҮІИөҪөЧЈ¬°lЙъЕцЧІөДҝЙДЬРФҫНәЬҙуЈ»Из№ыТ»Я…ЧғҫҖТ»Я…„xЬҮЈ¬„tҝЙДЬЕцЧІН¬ПтЬҮЭvЈ¬Тэ°lёьҮАЦШөДКВ№КЎЈФЩјУЙПУ^ІмПааҸЬҮөАөДЗйӣr•юҢ§ЦВЕР”а•rйgҫoҝsЈ¬ТтҙЛЈ¬ЯBИЛоҗ¶јәЬлyЧціцЧојСЯx“сЈ¬ИЛ№ӨЦЗДЬҫНДЬёг¶ЁҶбЈҝ

ЧФҸД20КАјo70Дкҙъй_КјЛгЖрЈ¬ЧФ„Ус{сӮПөҪyФЪҡWГАҮшјТТСҪӣЕоІӘ°lХ№УР50ДкЧуУТ•rйgЈ¬ёчҮшёч№«ЛҫёчёЯРЈй_°lіцФS¶аОе»Ё°ЛйTөДс{сӮЭoЦъ№ҰДЬЈ¬ШҪҙэПакPЦч№ЬІҝйTҷCҳӢҢҰЖд·Цјү·ЦоҗЎЈФЪЯ@ӮҖұіҫ°ПВЈ¬SAEЈЁГАҮшҷC„УЬҮ№ӨіМҺҹҢW•юЈ©әНNHTSAЈЁГАҮшёЯЛЩ№«В·°ІИ«№ЬАнҫЦЈ©іцЕ_БЛПакP·ЦјүҳЛңКЈ¬ТФSAE J316-2018һйАэЯMРРЦvҪвЈә
L0өДПөҪyјУңpЛЩәНЮDПт¶јКЗс{сӮҶTШ“ШҹЈ¬L1өДПөҪyјУңpЛЩ»тЮDПтЖдЦРТ»ӮҖКЗУЙПөҪyШ“ШҹЎЈL2өДПөҪyјУңpЛЩәНЮDПтҫщһйПөҪyШ“ШҹЈ¬ө«КЗПөҪy№ӨЧчөДЯ^іМЦРРиТӘс{сӮҶTЎ°ұO¶ҪЎұЈ¬ұШТӘ•rРиТӘс{сӮҶTЎ°јmХэЎұПөҪyөДІЩЧчЎЈL3өДПөҪyјУңpЛЩәНЮDПтҫщһйПөҪyШ“ШҹЈ¬№ӨЧчЯ^іМЦРТІІ»РиТӘс{сӮҶTЎ°ұO¶ҪЎұЈ¬ПөҪy•юЧФОТұO¶ҪЈ¬®”ПөҪyІ»ҝЙҝШ•rЈ¬МбКҫс{сӮҶTҝШЦЖЎЈL4өДПөҪyјУңpЛЩәНЮDПтЎўІ»РиТӘс{сӮҶTұO¶ҪЈ¬ПөҪy•юЧФОТұO¶ҪЈ¬ТІІ»РиТӘс{сӮҶTлS•rңКӮдҝШЦЖЈ¬З°МбКЗЦ»ДЬФЪІҝ·ЦУтК№УГЎЈL5өДПөҪyФЪL4»щөAЙПУЙІҝ·ЦУтМбЙэһйИ«ІҝУтЎЈ
ЧФ„Ус{сӮЖыЬҮХэФЪҸДОҙҒнүфПлСЭЧғһй®”ҙъ¬FҢҚЈ¬лSЦшјјРgіЙКмЈ¬ӮҖИЛәН№«№ІҪ»НЁҢўУАЯhЮDЧғЎЈЧоҪKЈ¬ҹoИЛс{сӮЖыЬҮҢўНкИ«ИЎҙъИЛоҗс{сӮҶTЈ¬өАВ·ЙПФЩТІӣ]УРОЈлUөДЎў»и»иУыЛҜөДЎўКЬӮыөДәН·ЦРДөДЛҫҷCЎЈ2017 ДкЈ¬ҪьЛДИfГАҮшИЛЛАУЪҪ»НЁКВ№КЈ¬“юГАҮшҮшјТ№«В·Ҫ»НЁ°ІИ«№ЬАнҫЦ (NHTSA) ·QЈ¬ЖдЦРјs 90ЈҘ өДКВ№ККЗИЛһйеeХ`ФміЙөДЎЈө«КЗЯ@н—јјРgұіәуөДФӯТтКЗЈ¬ҹoИЛс{сӮЖыЬҮҫҝҫ№ИзәОЧцөҪ°ІИ«Ј¬ТФј°ЯҖУР¶аҫГІЕДЬҹoРиҝҙВ·ҫНҝЙТФЙППВ°аЈҝ
ИЛ№ӨЦЗДЬтҢ„УЧФ„Ус{сӮЖыЬҮһйБЛК№ЖыЬҮҫЯУРЧФЦчРФЈ¬РиТӘІ»”аБЛҪвЖдЦЬҮъӯhҫі - КЧПИЈ¬НЁЯ^ёРЦӘЈЁЧR„eРЕПўІўҢўЖд·ЦоҗЈ©Ј¬И»әуНЁЯ^ЬҮЭvөДЧФ„У/УӢЛгҷCҝШЦЖҢҰРЕПўІЙИЎРР„УЎЈЧФ„Ус{сӮЖыЬҮРиТӘ°ІИ«ЗТн‘‘ӘСёЛЩөДҪвӣQ·Ҫ°ёЈ¬Я@Р©ҪвӣQ·Ҫ°ёРиТӘДЬүтФ”јҡБЛҪвс{сӮӯhҫіЈ¬И»әуФЪҙЛ»щөAЙПЛІйgЧціцӣQІЯЎЈБЛҪвс{сӮӯhҫіРиТӘНЁЯ^ЖыЬҮЙПұҠ¶аІ»Н¬ӮчёРЖчІ¶«@ҙуБҝ”ө“юЈ¬И»әуУЙЬҮЭvөДЧФ„Ус{сӮУӢЛгҷCПөҪyМҺАнЎЈ
һйБЛК№ЬҮЭvДЬүтФЪҹoИЛҝШЦЖөДЗйӣrПВХжХэРРсӮЈ¬ұШнҡКЧПИҢҰИЛ№ӨЦЗДЬ (AI) ҫWҪjЯMРРҙуБҝЕаУ–Ј¬ТФБЛҪвИзәОІйҝҙЎўБЛҪвЛщҝҙөҪөДғИИЭЈ¬ІўҢҰИОәОҝЙТФПлөҪөДҪ»НЁ оӣrЧціцХэҙ_өДӣQІЯЎЈЧФ„Ус{сӮЖыЬҮөДУӢЛгРФДЬЕcТ»Р©ҪьҺЧДкІЕУРөДЧоёЯРФДЬЖҪЕ_Па®”
L3ҢУјүөДЧФ„Ус{сӮПөҪyТСҪӣНкИ«ИЎҙъс{сӮҶTөДІЩЧчЈ¬Ц»КЗФЪҫoјұІ»ҝЙҝШЗйӣrПВБфҪoс{сӮҶT6-8sТФЙПөД•rйgҪУ№ЬЬҮЭvјҙҝЙЎЈЯ@ӮҖ•rәтДгҝЙТФЧшФЪс{сӮО»ЙП·ЕпwЧФОТЈәНжКЦҷCЎўҝҙҲујҲЎўәИӮҖҝ§·ИЎўВ В Тфҳ·ЎўҝҙҝҙТ•оlЈ¬ө«КЗІ»ДЬЛҜУXЈ¬ТтһйТ»ө©с{сӮҶTЛҜЦшБЛПлФЪ6-8sғИ°СЛыә°РСІўДЬХэҙ_өДҝШЦЖЬҮЭvЯ@ҙ_ҢҚУРьcлyЈ¬ЛщТФПөҪyҪ^ҢҰКЗІ»ФКФSс{сӮҶTЛҜУXөДЎЈФЪПөҪyХэіЈ№ӨЧч•rТӘңКҙ_өДҷzңyЦЬЯ…ХПөKОпәНЬҮЭvЈ¬ФЪПөҪyДіТ»Бгјюіц¬F№КХП•rТІТӘА^АmХэіЈ№ӨЧчТ»¶О•rйgЧҢс{сӮҶTУРЧгүтөД•rйgҒнҪУ№ЬҝШЦЖЬҮЭvЎЈЯ@ҢҰУЪХыӮҖЧФ„Ус{сӮПөҪy¶шСФКЗТ»ӮҖҮАҫюөДҝјтһЈ¬ТӘұЈЧCФЪХыӮҖёРЦӘЎўӣQІЯәНҲМРРҢУГж¶јТӘУРИЯУаЎЈТФҠWөПA8 TJPһйАэЈә
ХыЬҮ¶аӮҖәБГЧІЁАЧЯ_Ўўі¬В•ІЁАЧЯ_ЎўЗ°Т•”zПсо^ЎўӯhТ•”zПсо^»ҘСaИЪәПәНИЯУаЈ¬іэЦРСлҝШЦЖҶОФӘЈЁzFASЈ©Ц®НвЈ¬З°әБГЧІЁАЧЯ_ФЪёРЦӘЗ°·ҪРЕПўЦ®НвТІ°зСЭіЙҫ«әҶ°жИЯУаҝШЦЖЖч№ҰДЬЎЈФЪҲМРРҢУГжУРЬҮЙн·Җ¶ЁПөҪyЈЁESCЈ©+ҫҖҝШЦЖ„УЦъБҰЖчЎўЗ°ЭҶЮDПт+әуЭҶЮDПт»ҘһйИЯУаЎЈ
ФЪL2ј°ТФПВс{сӮЭoЦъ№ҰДЬ•rЈ¬с{сӮІЩЧчөДЦчуwЯҖКЗИЛЈ¬ҝШЦЖөДҢҰПуҫНКЗЖыЬҮЈ¬ЛщТФТӘ°СұҫЬҮөДЯ\РР о‘BРЕПўп@КҫҪoс{сӮҶTЈ¬ҪӣөдУЙИЛҝШЦЖөДҪзГжөДп@КҫЦчТӘ·ҪКҪЈәЮDЛЩұнҲAұP+ЬҮЛЩұнҲAұPЎЈ¶шL3ПөҪyҝШЦЖөДЦчуwКЗЖыЬҮЈ¬ҙЛ•rИЛҹoРиЯMРРјУңpЛЩәНЮDПтҝШЦЖЈ¬ғxұнЦ»РиТӘп@КҫL3өДҝШЦЖ о‘BјҙҝЙЎЈ
ө«ҢҰУЪҫЯӮдL3өДПөҪyТӘҫЯӮдИэ·NІ»Н¬өДғxұнҪзГжЈәҪӣөдИЛҝШЦЖөДҪзГжЈ¬L3ҝШЦЖҪзГжЈ¬ҪӣөдИЛҝШЦЖөДҪзГж+L3ҝШЦЖҪзГжЈ¬ҢҰУЪҪӣөдИЛ+L3ҝШЦЖҪзГжУГНҫКЗКІГҙДШЈҝҫНКЗФЪПөҪyНЛіц»тИЛЦч„УҪУ№Ь•rғxұнјИТӘп@КҫL3ПөҪyҝШЦЖ о‘BәНЬҮЭvЯ\РР о‘BЈ¬ТФұЈЧCЭ^әГөДҢҚ¬FИЛҷCс{сӮөДЗР“QЎЈ
ОТӮғЧФјәй_ЬҮөДЯ^іМЦРҪӣіЈ•юУцөҪёч·NөДХыЬҮ®җіЈЗйӣrЈәИз№КХП•rЦъБҰЦұҪУНЛіцҢ§ЦВЮDІ»„У·ҪПтұPЈ¬ЦЖ„У®җіЈҢ§ЦВҹo„xЬҮЎЈИЛй_ЬҮөДЯ^іМЦРіц¬FөДЯ@Р©ҫoјұЗйӣrЯҖҝЙТФІЙИЎёч·NҫoјұҙлК©ұЬлUЈ¬ө«КЗҢҰУЪL3ПөҪyс{сӮҶTОҙЧўТ•З°·ҪОҙКЦ·ц·ҪПтұPЈ¬№ҰДЬҝШЦЖЦұҪУНЛіцКЗ·ЗіЈТӘГьөДЈ¬ПөҪy№©‘ӘЙМТӘіР“ъИ«ІҝШҹИОЎЈ
ҸДL2өҪL3өДМшЬSЈ¬К№ЖыЬҮХЖҝШҷаУЙИЛЮDТЖөҪҷCЖчЈ¬лyФЪДДАпЈҝАоөВТгЦёіцБЛИэьcЈәЧФ„Ус{сӮөИјүЮD“QьcИзәО№АБҝЈҝХЖҝШҷаҪ»ҪУьcИзәО¶ИБҝЈҝХЖҝШҷаҪ»ҪУЯ^іМЦРөДКВ№КИзәО¶ИБҝЈҝ
Ў°ИЛТСҪӣ°СЖыЬҮАпөДЧФ„УҝШЦЖЧцөҪБЛҳOЦВЈ¬Н¬•rТІУ|ЕцөҪБЛЧФ„У»ҜөДМм»Ё°еЈ¬ПВТ»ІҪРиТӘТАҝҝИЛ№ӨЦЗДЬҒнНкіЙЎЈЎұАоөВТгХfЎЈТІҫНКЗХfЈ¬ЧФ„Ус{сӮ°lХ№ТӘПлЯMлAЈ¬ЖдЦРЧоҝЙДЬөДҪвӣQВ·ҸҪКЗИЛ№ӨЦЗДЬЎЈ
КВҢҚЙПЈ¬ДҝЗ°І»ЙЩЖуҳI¶јдXҰУЦғҰУГИЛ№ӨЦЗДЛGлHхКөПЦёёЯјү„eөДЧФ„Ус{сӮЎЈФЪҙЛЯ^іМЦРЈ¬ИЛ№ӨЦЗДЬЦрқuұ»ХJһйКЗҢҚ¬FЧФ„Ус{сӮЖыЬҮөДкPжIЛщФЪЈ¬КЗНЖ„УЧФ„Ус{сӮЙМҳI»ҜөДәЛРДЎЈ
ИЛ№ӨЦЗДЬБўЧгУЪЎ°ҷCЖчҢWБ•ЎұЈ¬КЗҢўИЛоҗҢWБ•Я^іМЎ°Нв»ҜЎұЎЈЯx“сәПЯmөДДЈРНЈ¬ЧҢДЈРНҢWБ•ҳУұҫЈ¬ҸД¶шХТіц”ө“юөДғИФЪТҺВЙЈ¬ҸД¶шРОіЙҢҰОҙЦӘВ·ӣrөДЎ°ҪӣтһЎұЎЈКВҢҚЧCГчЈ¬ҷCЖчҢWБ•Ј¬ёьЙЖУЪҸДәЈБҝ”ө“юЦРійПуМбҹ’іцИфёЙУРғrЦөөДТтЛШЈ¬Н¬•rҙ_¶ЁТтЛШЦ®йgөДПакPРФЈ¬Іўҙ_Бў‘ӘҢҰІЯВФЎЈө«ұҫөШЛг·Ёҹo·ЁәӯЙwЛщУРВ·ӣrЈ¬ФOУӢХЯұШнҡЩxУиҹoИЛс{сӮПөҪyТ»¶ЁөДЧФЦчҷаЈ¬ұЬГвФЪМШКвВ·ӣrПВФ“ПөҪyІ»ЦӘЛщҙлЎЈ
АэИзЈ¬ФЪ№«В·ЙПҝмЛЩРРсӮөДс{сӮҶTЈ¬ҢҰН»И»Я`ТҺҷMҙ©сRВ·өДРРИЛИұ·ҰоAЖЪЈ¬¶шИЛ№ӨЦЗДЬТІәЬлyҸДҳУұҫЦРҢWөҪЈ¬ИзәОҢҰё¶Н»И»іц¬FөДХПөKЈҝ
АнХ“ЙПЈ¬ҹoИЛПөҪyөДӮчёРЖчұИИЛоҗс{сӮҶTёьФзөШ°l¬FЯ`ТҺРРИЛЎЈө«Из№ыРРИЛІЙИЎҝмЛЩұјЕЬЈ¬јУЛЩҸДЬҮЗ°кJЯ^өИІ»ГчЦЗөДЧц·ЁЎЈҙЛ•rјЩФO„xЬҮҫалxІ»үтЈ¬ЛҫҷCҢўЧуУТһйлyЈ¬јЩИзҢў„xЬҮІИөҪөЧЈ¬°lЙъЕцЧІөДҝЙДЬРФҫНәЬҙуЈ»Из№ыТ»Я…ЧғҫҖТ»Я…„xЬҮЈ¬„tҝЙДЬЕцЧІН¬ПтЬҮЭvЈ¬Тэ°lёьҮАЦШөДКВ№КЎЈФЩјУЙПУ^ІмПааҸЬҮөАөДЗйӣr•юҢ§ЦВЕР”а•rйgҫoҝsЈ¬ТтҙЛЈ¬ЯBИЛоҗ¶јәЬлyЧціцЧојСЯx“сЈ¬ИЛ№ӨЦЗДЬҫНДЬёг¶ЁҶбЈҝ
 ПакPјјРgЩYБП
ПакPјјРgЩYБП- 11-22РВТ»ҙъ5G-AДЈҪMRG650V-NAҪYҳӢјјРg…ў”ө‘ӘУГј°РиЗу·ЦОц
- 11-22лҠіШғҰДЬПөҪy (BESS)ҪYҳӢФOУӢј°ҪвӣQ·Ҫ°ё
- 11-22И«РВёЯГ}ӣ_ЦЖ„УлҠЧиПөБР…ў”өјјРg‘ӘУГФOУӢ
- 11-22Telcordia GR-468 COREңyФҮ‘ӘУГИ«
- 11-22DSPЈЁ”өЧЦРЕМ–МҺАнЖчЈ©ПөБРҪйҪB
- 11-22AI ISPөДјјРgғһ„ЭәНКРҲц°lХ№Ъ…„Э
- 11-21ҳIғИКЧҝоHBM4ҝШЦЖЖчIPјјРgғһ„Эј°УӢЛг‘ӘУГ
- 11-21ARM Cortex-AПөБРМҺАнЖчЛг·ЁЯ\Лг̴
- 11-21AI ISPөДјјРgғһ„ЭәНКРҲц°lХ№Ъ…„ЭФ”Зй
- 11-21И«ЗтХЫҜBЖБИбУоп@КҫјјРg‘ӘУГғһ„Эј°КРҲц°lХ№Ъ…„Э·ЦОц
- 11-21РВТ»ҙъ·ю„ХЖчРҫЖ¬ 3C6000 ПөБР°lХ№ғһ„Э
- 11-21 80 TOPS ЛгБҰЦЗДЬс{сӮҢЈУГРҫЖ¬
ҹбйTьc“ф
- SCOMјҙЎ¶ЦЗ»ЫіЗКРЯ\ IҝтјЬЎ·
- ЕдлҠҪK¶ЛөДҪ»БчлҠФҙөДФOЦГ
- ЧФ„Ус{сӮЖыЬҮХэФЪҸДОҙҒнүфПлСЭЧғһй®”ҙъ¬FҢҚ
- јҜЦР…ў”өФӘјюRЎўCЎўLІ»ғHУРМШРФ…ў”өәНТҺёс…ў
- РВДЬФҙЖыЬҮКРҲцХэФЪјұ„ЎФцйL
- ЛчДбӮдКЬәГФuөД1000XПөБРҹo
- ЦШәПЖчAһйТ»ВэТ»ҝмРОКҪ
- Ў°ұұЖыјҜҲFЧФЦчЖ·ЕЖХыәПөДҙуД»ХэКҪй_ҶўЎұ
- ҢўТФПВҺЧн—јјРgЦёҳЛЧчһй”өЧЦҙжғҰКҫІЁЖчөДЯxРНТА
НЖЛ]јјРgЩYБП
- оlЧVғxөДҪвХ{№ҰДЬ
- ¬FҙъоlЧVғxФЪёъЫҷФҙДЈКҪПВТІҝЙТФК№УГMakerәНЎчMak... [Ф”јҡ]
- РВТ»ҙъ5G-AДЈҪMRG650V
- лҠіШғҰДЬПөҪy (BESS)ҪYҳӢ
- И«РВёЯГ}ӣ_ЦЖ„УлҠЧиПөБР…ў”өјјРg‘ӘУГФOУӢ
- Telcordia GR-46
- DSPЈЁ”өЧЦРЕМ–МҺАнЖчЈ©ПөБРҪй
- AI ISPөДјјРgғһ„ЭәНКРҲц°lХ№Ъ…„Э
- ¶аГҪуw…fМҺАнЖчSM501ФЪЗ¶ИлКҪПөҪyЦРөД‘ӘУГ
- »щУЪIEEE802.11bөДEPAңШ¶ИЧғЛНЖч
- QUICCEngineРВТэЗжНЖ„УIPҫWҪjёпРВ
- SoCГжКА°ЛДкәуөД®aҳIҷCУц
- MPC8xxПөБРМҺАнЖчөДЗ¶ИлКҪПөҪyлҠФҙФOУӢ
- dsPICј°ЖдФЪҪ»БчЧғоlХ{ЛЩЦРөД‘ӘУГСРҫҝ
 №«ҫW°ІӮд44030402000607
№«ҫW°ІӮд44030402000607





