
P89LV51RD2FA512閉合時觸點的碰撞
發布時間:2019/10/28 22:14:21 訪問次數:1682
P89LV51RD2FA512觸點電動力除了由于電流線在接觸點附近的收縮現象而引起以外,與觸點相連的,通過大電流的導體在一定的布置下,也可能在觸點上引起電動力。以圖2-15的結構為例,觸點下面垂直的兩段導體中的電流,在動觸點附近建立的磁場中受到一個使觸點分離的電動力Pdd。
為了改善觸點的接觸性能,保證開關電器可靠的工作和電力系統的安全運行,往往采取電動力補償措施來削弱電動斥力的影響。但是在后面將會討論到,電動力可以幫助開關電器熄滅電弧,這可以說是它的有利方面。
觸點彈跳是發生在觸點閉合過程中的一種現象。由于觸點發生的彈跳使得觸點的閉合不是一次完成的,而需要經過多次的閉合、回跳、再閉合、再回跳……直至最后閉合。所以觸點彈跳也可稱為觸點的機械振動或觸點回跳。引起觸點彈跳的原因有二,其一是由于在閉合過程中的碰撞;其二是因為觸點存在的電動斥力,將已閉合的動觸點推斥開。
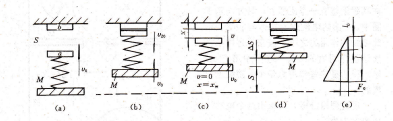
閉合時觸點的碰撞過程(a)觸點口以速度o0向靜觸點犭運動;(b)兩觸點碰撞瞬間;(c)動觸點四被彈回的極限位置;(d)碰撞結束;(e)觸點壓縮彈簧特性,其中J為彈簧的自由高度。

圖2-16所示的是閉合時觸點的碰撞過程,圖中口為動觸點,莎為靜觸點,觸點間隙為S,超行程為△S,觸點彈簧的自由高度為J,預壓縮量為z。,相應的觸點初壓力為FO,觸橋是M。在觸點閉合過程中,動觸點夕以速度v0和靜觸點沙相碰撞。由于靜觸點3是固定不動的,而動觸點夕具有較高的速度,則碰撞的結果使動觸點夕以速度v2。向相反的方向彈回,使得動觸點夕和靜觸點3又分離開。同時,當動觸點夕彈回的過程中,觸點彈簧因受壓縮而產生一個反對動觸點夕向反方向運動的力,促使動觸點彈回的速度田2。逐漸降低到零,如圖2-16(c)所示。以后動觸點傷又重新開始向靜觸點3的方向運動。于是,動、靜觸點又重新閉合,發生第二次碰撞。可見觸點的閉合過程是經過一系列的碰撞后才完成的。這種現象正像一個玻璃珠掉到水泥地板上,玻璃珠會上下彈跳幾下,最串行進位加法器若有多位數相加,則可采用并行相加串行進位的方式來完成。例如,有2個4位二進制數A3A2A1處。和B3B2BIBO相加,可以采用4個全加器構成4位數加法器,其原理圖如圖4.4.33所示。將低位的進位輸出信號接到高位的進位輸入端,因此,任意1位的加法運算必須在低1位的運算完成之后才能進行,這種進位方式稱為串行進位。這種加法器的邏輯電路比較簡單,但它的運算速度不高。為克服這一缺點,可以采用超前進位等方式。
P89LV51RD2FA512觸點電動力除了由于電流線在接觸點附近的收縮現象而引起以外,與觸點相連的,通過大電流的導體在一定的布置下,也可能在觸點上引起電動力。以圖2-15的結構為例,觸點下面垂直的兩段導體中的電流,在動觸點附近建立的磁場中受到一個使觸點分離的電動力Pdd。
為了改善觸點的接觸性能,保證開關電器可靠的工作和電力系統的安全運行,往往采取電動力補償措施來削弱電動斥力的影響。但是在后面將會討論到,電動力可以幫助開關電器熄滅電弧,這可以說是它的有利方面。
觸點彈跳是發生在觸點閉合過程中的一種現象。由于觸點發生的彈跳使得觸點的閉合不是一次完成的,而需要經過多次的閉合、回跳、再閉合、再回跳……直至最后閉合。所以觸點彈跳也可稱為觸點的機械振動或觸點回跳。引起觸點彈跳的原因有二,其一是由于在閉合過程中的碰撞;其二是因為觸點存在的電動斥力,將已閉合的動觸點推斥開。
閉合時觸點的碰撞過程(a)觸點口以速度o0向靜觸點犭運動;(b)兩觸點碰撞瞬間;(c)動觸點四被彈回的極限位置;(d)碰撞結束;(e)觸點壓縮彈簧特性,其中J為彈簧的自由高度。
圖2-16所示的是閉合時觸點的碰撞過程,圖中口為動觸點,莎為靜觸點,觸點間隙為S,超行程為△S,觸點彈簧的自由高度為J,預壓縮量為z。,相應的觸點初壓力為FO,觸橋是M。在觸點閉合過程中,動觸點夕以速度v0和靜觸點沙相碰撞。由于靜觸點3是固定不動的,而動觸點夕具有較高的速度,則碰撞的結果使動觸點夕以速度v2。向相反的方向彈回,使得動觸點夕和靜觸點3又分離開。同時,當動觸點夕彈回的過程中,觸點彈簧因受壓縮而產生一個反對動觸點夕向反方向運動的力,促使動觸點彈回的速度田2。逐漸降低到零,如圖2-16(c)所示。以后動觸點傷又重新開始向靜觸點3的方向運動。于是,動、靜觸點又重新閉合,發生第二次碰撞。可見觸點的閉合過程是經過一系列的碰撞后才完成的。這種現象正像一個玻璃珠掉到水泥地板上,玻璃珠會上下彈跳幾下,最串行進位加法器若有多位數相加,則可采用并行相加串行進位的方式來完成。例如,有2個4位二進制數A3A2A1處。和B3B2BIBO相加,可以采用4個全加器構成4位數加法器,其原理圖如圖4.4.33所示。將低位的進位輸出信號接到高位的進位輸入端,因此,任意1位的加法運算必須在低1位的運算完成之后才能進行,這種進位方式稱為串行進位。這種加法器的邏輯電路比較簡單,但它的運算速度不高。為克服這一缺點,可以采用超前進位等方式。
 相關技術資料
相關技術資料- 11-23模擬和混合信號平臺Treo詳情
- 11-23PXI和LXI模塊化解決方案解讀
- 11-23AN-13-0004_CAN收發器結構參數特點應用設計
- 11-23屏蔽柵槽溝技術 (SGT)主要特性及功能應用
- 11-23第一代SGT MOSFET系列技術結構參數封裝
- 11-23全球首顆GSE DPU芯片發布
- 11-22新一代5G-A模組RG650V-NA結構技術參數應用及需求分析
- 11-22電池儲能系統 (BESS)結構設計及解決方案
- 11-22全新高脈沖制動電阻系列參數技術應用設計
- 11-22Telcordia GR-468 CORE測試應用全
- 11-22DSP(數字信號處理器)系列介紹
- 11-22AI ISP的技術優勢和市場發展趨勢
 公網安備44030402000607
公網安備44030402000607





