
TPU模塊CPU32寫入數據對步進電機旋轉速度和方向進行控制
發布時間:2022/11/25 22:43:25 訪問次數:195
ROM中存放各種系統程序,RAM中存放系統參數和用戶編寫的加工程序。
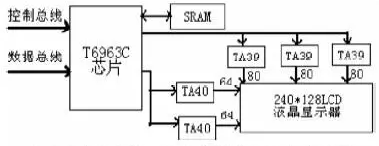
I/O口是該系統的離散輸入輸出口,它由MC68B21實現。鍵盤由8279鍵盤專用控制電路控制,它由48個薄膜鍵組成。LCD采用256×128點陣的圖形液晶顯示器,其控制器為SED1330。MC68B21、8279和LCD均連接到SIM模塊,所需片選信號和其它接口信號由SIM產生。
驅動電路連接到TPU模塊,由TPU模塊根據CPU32寫入的數據對步進電機的旋轉速度、轉動方向進行控制。TPU可以同時控制4臺4相步進電機,提供的信號最高頻率為22.5kHz,而且加減速度、旋轉方向和速度都可以編程控制,應用十分方便。
工作過程簡述如下:當P13電位下跌時,周期測試開始,到第二次P13下跌時,周期測試結束(區間為AA~AD)。兩次下跌的時間間隔即為工頻的周期,具有準確的跟蹤特性。
在周期測試開始后4μs,T0溢出產生中斷,執行中斷子程序,總共32次。中斷子程序都是在AD~AC間執行的,也即在第一周期內所有需要測量的量都已測出。從AD往后便是第二周期,主要用來計算Ta、Tb的值,并將IC5內的數據傳送出去。

8個模擬通道的采樣并不是同時進行而是按序進行的,后面的通道對前面的通道而言有一個時間上的滯后,這會給測量帶來某些誤差。常用的方法是將各模擬量的位置進行調整,將關系密切的量逐個緊排,以減少滯后帶來的影響。
當然,提高協處理器的速度和采用高速A/D變換器也有助于滯后的減小(可做到0.2°以內)。然而,最終解決這個問題的辦法是采用同時式采樣保持電路,也即在圖1的IC1前加入8片采樣保持芯片,并由IC3實施控制。
模擬量輸入通道(包括傳感器或電壓/電流互感器、放大器、濾波電路等)均會形成一定的附加相移。若各通道的附加相移相等,則對測量的精度不會有影響。

來源:21ic.如涉版權請聯系刪除。圖片供參考
上海德懿電子科技有限公司 www.deyie.com
ROM中存放各種系統程序,RAM中存放系統參數和用戶編寫的加工程序。
I/O口是該系統的離散輸入輸出口,它由MC68B21實現。鍵盤由8279鍵盤專用控制電路控制,它由48個薄膜鍵組成。LCD采用256×128點陣的圖形液晶顯示器,其控制器為SED1330。MC68B21、8279和LCD均連接到SIM模塊,所需片選信號和其它接口信號由SIM產生。
驅動電路連接到TPU模塊,由TPU模塊根據CPU32寫入的數據對步進電機的旋轉速度、轉動方向進行控制。TPU可以同時控制4臺4相步進電機,提供的信號最高頻率為22.5kHz,而且加減速度、旋轉方向和速度都可以編程控制,應用十分方便。
工作過程簡述如下:當P13電位下跌時,周期測試開始,到第二次P13下跌時,周期測試結束(區間為AA~AD)。兩次下跌的時間間隔即為工頻的周期,具有準確的跟蹤特性。
在周期測試開始后4μs,T0溢出產生中斷,執行中斷子程序,總共32次。中斷子程序都是在AD~AC間執行的,也即在第一周期內所有需要測量的量都已測出。從AD往后便是第二周期,主要用來計算Ta、Tb的值,并將IC5內的數據傳送出去。
8個模擬通道的采樣并不是同時進行而是按序進行的,后面的通道對前面的通道而言有一個時間上的滯后,這會給測量帶來某些誤差。常用的方法是將各模擬量的位置進行調整,將關系密切的量逐個緊排,以減少滯后帶來的影響。
當然,提高協處理器的速度和采用高速A/D變換器也有助于滯后的減小(可做到0.2°以內)。然而,最終解決這個問題的辦法是采用同時式采樣保持電路,也即在圖1的IC1前加入8片采樣保持芯片,并由IC3實施控制。
模擬量輸入通道(包括傳感器或電壓/電流互感器、放大器、濾波電路等)均會形成一定的附加相移。若各通道的附加相移相等,則對測量的精度不會有影響。
來源:21ic.如涉版權請聯系刪除。圖片供參考
上海德懿電子科技有限公司 www.deyie.com
 相關技術資料
相關技術資料- 11-22新一代5G-A模組RG650V-NA結構技術參數應用及需求分析
- 11-22電池儲能系統 (BESS)結構設計及解決方案
- 11-22全新高脈沖制動電阻系列參數技術應用設計
- 11-22Telcordia GR-468 CORE測試應用全
- 11-22DSP(數字信號處理器)系列介紹
- 11-22AI ISP的技術優勢和市場發展趨勢
- 11-21業內首款HBM4控制器IP技術優勢及計算應用
- 11-21ARM Cortex-A系列處理器算法運算̴
- 11-21AI ISP的技術優勢和市場發展趨勢詳情
- 11-21全球折疊屏柔宇顯示技術應用優勢及市場發展趨勢分析
- 11-21新一代服務器芯片 3C6000 系列發展優勢
- 11-21 80 TOPS 算力智能駕駛專用芯片

 公網安備44030402000607
公網安備44030402000607





