
直流電動機PWM調壓調速的數字PID控制實現
發布時間:2011/10/8 10:41:40 訪問次數:4563
(一)總體設計 HBS050ZH-ANT
基本的設計思路是運用PID調節器,實現直流電動機在帶動負載的情況下也能穩定地運行。運用A/D轉換芯片將滑動變阻器的模擬電壓轉換為數字量作為控制直流電動機速度的給定值;用壓控振蕩器模擬直流電動機的運行(電壓高一轉速高一脈沖多),單片機在單位時間內對脈沖計數作為電動機速度的檢測值;應用數字PID模型作單片機控制編程,其中P、I、D參數可按鍵輸入并用LED教碼顯示;單片機PWM調寬輸出作為輸出值,開關驅動、電子濾波控制模擬電動機(壓控振蕩器)實現對直流電動機的PID調壓調速功能。
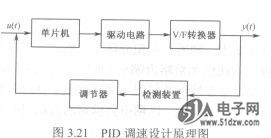
該控制系統是一個閉環系統,借助單片機來控制A/D芯片將模擬電壓轉換成數字電壓,A/D給定的電壓越大,則產生的數字量越大,單片機再控制這個數字量產生一個PWM。PWM占空比越大,驅動晶體管導通的時間越長,這樣加到壓頻轉換器的電壓也就越大。電壓越大,則壓頻轉換器在單位時間輸出的計數脈沖也就越多,相當于電動機的電壓越大,其轉速也就會越快。再用單片機對壓頻轉換器的輸出脈沖計數,PID調節器就把這個計數脈沖和預先設定的值進行比較,若比設定值小,則得到一個正偏差,將偏差加到A/D的給定電壓,相當于加大了PWM的占空比;要是比設定值大,則會得到一個負偏差,就把這個偏差與給定的電壓相減,減小PWM的占空比,通過改變占空比來改變晶體管的導通時間,就可以改變壓頻轉換器的輸入電壓,也就改變了壓頻轉換器的單位計數脈沖,從而達到調節電動機速度的目的。
(二) PWM調制
A/D芯片給定一定的電壓,用單片機控制來產生一個PWM,給定的電壓不同,就會得到不同的PWM波形。設計中選用ADC0808和AT89C51來實現。
產生PWM波后,就可以借助PWM脈沖來控制晶體管的導通和關斷,給壓頻轉換器提供一定的電壓,利用Protues進行仿真,給定一個+12V的電壓,通過晶體管的導通和關斷來給壓頻轉換器供電,壓頻轉換器就會輸出很多的脈沖,借助單片機P3.5來計數,其計數送給PO顯示。通過給定不同的A/D的輸入電壓,就可以得到不同的計數顯示,電壓越大,其計數顯示也就越大,改變計數脈沖的周期和硬件壓頻轉換器(LM331)的電阻和電容,就可以得到與輸入電壓接近的數值顯示,得到一個很理想的開環系統,為閉環PWM調節做好準備。
當開環系統穩定后,加上一個擾動,或者說是加上負載,就使得壓頻轉換器的電壓減小,給定一定電壓,在負載分壓情況下,相當于直流電動機的電壓會減小,其轉速就會下降;或者說當有負載時,壓頻轉換器的輸入電壓就會減小,輸人的脈沖在單位時間就會減少。設計PID調節器,通過改變PID的參數,來改變原來的PWM的占空比,使得晶體管的導通時間加長或減少,這樣就改變了直流電動機的輸入電壓,即在Protues壓頻轉換器的輸入電壓,使得輸出的計數脈沖在單位時間發生改變,從而模擬了直流電動機的轉速的改變。由于偏差的存在,使得PID調節器不斷地去修正,形成閉環調節系統,使得結果無限接近所預期的設定值。
基于單片機的數字PID控制直流電動機PWM調壓調速原理如圖3.22所示。

(一)總體設計 HBS050ZH-ANT
基本的設計思路是運用PID調節器,實現直流電動機在帶動負載的情況下也能穩定地運行。運用A/D轉換芯片將滑動變阻器的模擬電壓轉換為數字量作為控制直流電動機速度的給定值;用壓控振蕩器模擬直流電動機的運行(電壓高一轉速高一脈沖多),單片機在單位時間內對脈沖計數作為電動機速度的檢測值;應用數字PID模型作單片機控制編程,其中P、I、D參數可按鍵輸入并用LED教碼顯示;單片機PWM調寬輸出作為輸出值,開關驅動、電子濾波控制模擬電動機(壓控振蕩器)實現對直流電動機的PID調壓調速功能。
該控制系統是一個閉環系統,借助單片機來控制A/D芯片將模擬電壓轉換成數字電壓,A/D給定的電壓越大,則產生的數字量越大,單片機再控制這個數字量產生一個PWM。PWM占空比越大,驅動晶體管導通的時間越長,這樣加到壓頻轉換器的電壓也就越大。電壓越大,則壓頻轉換器在單位時間輸出的計數脈沖也就越多,相當于電動機的電壓越大,其轉速也就會越快。再用單片機對壓頻轉換器的輸出脈沖計數,PID調節器就把這個計數脈沖和預先設定的值進行比較,若比設定值小,則得到一個正偏差,將偏差加到A/D的給定電壓,相當于加大了PWM的占空比;要是比設定值大,則會得到一個負偏差,就把這個偏差與給定的電壓相減,減小PWM的占空比,通過改變占空比來改變晶體管的導通時間,就可以改變壓頻轉換器的輸入電壓,也就改變了壓頻轉換器的單位計數脈沖,從而達到調節電動機速度的目的。
(二) PWM調制
A/D芯片給定一定的電壓,用單片機控制來產生一個PWM,給定的電壓不同,就會得到不同的PWM波形。設計中選用ADC0808和AT89C51來實現。
產生PWM波后,就可以借助PWM脈沖來控制晶體管的導通和關斷,給壓頻轉換器提供一定的電壓,利用Protues進行仿真,給定一個+12V的電壓,通過晶體管的導通和關斷來給壓頻轉換器供電,壓頻轉換器就會輸出很多的脈沖,借助單片機P3.5來計數,其計數送給PO顯示。通過給定不同的A/D的輸入電壓,就可以得到不同的計數顯示,電壓越大,其計數顯示也就越大,改變計數脈沖的周期和硬件壓頻轉換器(LM331)的電阻和電容,就可以得到與輸入電壓接近的數值顯示,得到一個很理想的開環系統,為閉環PWM調節做好準備。
當開環系統穩定后,加上一個擾動,或者說是加上負載,就使得壓頻轉換器的電壓減小,給定一定電壓,在負載分壓情況下,相當于直流電動機的電壓會減小,其轉速就會下降;或者說當有負載時,壓頻轉換器的輸入電壓就會減小,輸人的脈沖在單位時間就會減少。設計PID調節器,通過改變PID的參數,來改變原來的PWM的占空比,使得晶體管的導通時間加長或減少,這樣就改變了直流電動機的輸入電壓,即在Protues壓頻轉換器的輸入電壓,使得輸出的計數脈沖在單位時間發生改變,從而模擬了直流電動機的轉速的改變。由于偏差的存在,使得PID調節器不斷地去修正,形成閉環調節系統,使得結果無限接近所預期的設定值。
基于單片機的數字PID控制直流電動機PWM調壓調速原理如圖3.22所示。
上一篇:PID參數整定方法
上一篇:Multisim對元器件的管理
 相關技術資料
相關技術資料- 12-12電熱水器控制電路
- 10-8直流電動機PWM調壓調速的數字PID控制實現

 公網安備44030402000607
公網安備44030402000607





