
PID參數整定方法
發布時間:2011/10/8 10:24:11 訪問次數:7155
PID控制器參數整定的方法很多,概括起來有兩大類: I048C030T021P2
一是理論計算整定法。它主要依據系統的數學模型,經過理論計算確定控制器參數。這種方法所得到的計算數據未必可以直接用,還必須通過工程實際進行調整和修改。
二是工程整定方法,它主要依賴工程經驗,直接在控制系統的試驗中進行,該方法簡單,易于掌握,在工程實際中被廣泛采用。PID控制器參數的工程整定方法,主要有臨界比例法、響應曲線法和衰減法。三種方法各有特點,其共同點都是通過試驗,然后按照工程經驗公式對控制器參數進行整定。但無論采用哪一種方法,所得到的控制器參數都需要在實際運行中進行最后調整寫完善。現在一般采用的是臨界比例法。
1.擴充臨界比例法
擴充臨界比例法適用于有自平衡特性的被控對象,比例(度)δ比例系數Kp成倒數關系。整定數字調節器參數的步驟如下。
①選擇采樣周期為被控對象純滯后時間的十分之一以下。
②去掉積分作用和微分作用,逐漸增大比例度系數KP直至系統對階躍輸入的響應達到臨界振蕩狀態(穩定邊緣),記下此時的臨界比例系數δ及系統的臨界振蕩周期TK。
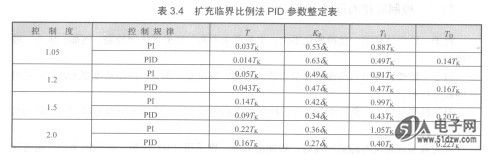
③選擇控制度。

通常,當控制度為1.05時,就可以認為DDC與模擬控制效果相當。
④根據選定的控制度,查表3.4求得T、KP、T1、TD的值。
2.擴充響應曲線法
擴充響應曲線法適用于多容量自平衡系統,參數整定步驟如下。
①讓系統處于手動操作狀態,將被調量調節到給定值附近,并使之穩定下來,然后突然改變給定值,給對象一個階躍輸入信號。
②用記錄儀表記錄被調量在階躍輸入下的整個變化過程曲線,如圖3.20所示。
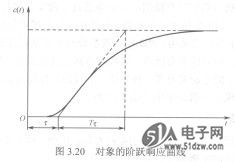
③在曲線最大斜率處作切線,求得滯后時間τ被控對象時間常數Tτ以及它們的比值Tτ/T
④由求得的τ正及Tτ及τ查表3.5,即可求得數字調節器的有關參數KP、TI、TD及采樣周期T。
PID控制器參數整定的方法很多,概括起來有兩大類: I048C030T021P2
一是理論計算整定法。它主要依據系統的數學模型,經過理論計算確定控制器參數。這種方法所得到的計算數據未必可以直接用,還必須通過工程實際進行調整和修改。
二是工程整定方法,它主要依賴工程經驗,直接在控制系統的試驗中進行,該方法簡單,易于掌握,在工程實際中被廣泛采用。PID控制器參數的工程整定方法,主要有臨界比例法、響應曲線法和衰減法。三種方法各有特點,其共同點都是通過試驗,然后按照工程經驗公式對控制器參數進行整定。但無論采用哪一種方法,所得到的控制器參數都需要在實際運行中進行最后調整寫完善。現在一般采用的是臨界比例法。
1.擴充臨界比例法
擴充臨界比例法適用于有自平衡特性的被控對象,比例(度)δ比例系數Kp成倒數關系。整定數字調節器參數的步驟如下。
①選擇采樣周期為被控對象純滯后時間的十分之一以下。
②去掉積分作用和微分作用,逐漸增大比例度系數KP直至系統對階躍輸入的響應達到臨界振蕩狀態(穩定邊緣),記下此時的臨界比例系數δ及系統的臨界振蕩周期TK。
③選擇控制度。
通常,當控制度為1.05時,就可以認為DDC與模擬控制效果相當。
④根據選定的控制度,查表3.4求得T、KP、T1、TD的值。
2.擴充響應曲線法
擴充響應曲線法適用于多容量自平衡系統,參數整定步驟如下。
①讓系統處于手動操作狀態,將被調量調節到給定值附近,并使之穩定下來,然后突然改變給定值,給對象一個階躍輸入信號。
②用記錄儀表記錄被調量在階躍輸入下的整個變化過程曲線,如圖3.20所示。
③在曲線最大斜率處作切線,求得滯后時間τ被控對象時間常數Tτ以及它們的比值Tτ/T
④由求得的τ正及Tτ及τ查表3.5,即可求得數字調節器的有關參數KP、TI、TD及采樣周期T。
上一篇:采樣周期的選擇
 相關技術資料
相關技術資料- 10-8PID參數整定方法
- 相關IC型號
- I048C030T021P2
- 暫無最新型號
熱門點擊

 公網安備44030402000607
公網安備44030402000607





