
交流步進控制與定位矢量的關系
發布時間:2012/6/9 15:03:53 訪問次數:730
如果電動機三相定子繞組中通入的PEB3265HV1.5不是連續的正弦波電流,而是按某種規律離散后的階梯波。這里按等步距方法將正弦電流加以離散,則定子電流為
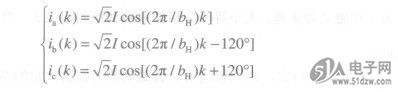
式中,bH為循環拍數,也即電流的一個周期等分為bH份,bH為正整數。
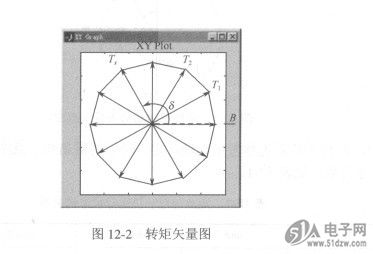
對于三相電動機bH還必須是6的倍數,這樣才能保證三相電流對稱。另外,bH也是電動機環形分配器的循環拍數,它代表電動機轉子行進兩個極距所用的主令脈沖拍數。七代表主令脈沖拍數,為O~(bH -1)間的任一整數。每發出一個主令脈沖,式(12-5)的電流就變換一次,定子磁動勢EF在電動機的定子圓周上取得若干個預選的定位點,形成正多邊形磁動勢,即

定子磁動勢在定子氣隙中所停靠的位置也就是實現電動機位置控制時能夠提動的定位點數。
下面的分析均以bH=12為例,矩角特性與定位矢量關系(將Os作為電動機角度給定值),如圖12-2所示。
如果電動機三相定子繞組中通入的PEB3265HV1.5不是連續的正弦波電流,而是按某種規律離散后的階梯波。這里按等步距方法將正弦電流加以離散,則定子電流為
式中,bH為循環拍數,也即電流的一個周期等分為bH份,bH為正整數。
對于三相電動機bH還必須是6的倍數,這樣才能保證三相電流對稱。另外,bH也是電動機環形分配器的循環拍數,它代表電動機轉子行進兩個極距所用的主令脈沖拍數。七代表主令脈沖拍數,為O~(bH -1)間的任一整數。每發出一個主令脈沖,式(12-5)的電流就變換一次,定子磁動勢EF在電動機的定子圓周上取得若干個預選的定位點,形成正多邊形磁動勢,即
定子磁動勢在定子氣隙中所停靠的位置也就是實現電動機位置控制時能夠提動的定位點數。
下面的分析均以bH=12為例,矩角特性與定位矢量關系(將Os作為電動機角度給定值),如圖12-2所示。
上一篇:交流步進控制
上一篇:交流步進定位控制系統
 相關技術資料
相關技術資料- 2-25紅外線接收電路
- 6-9交流步進控制與定位矢量的關系
 公網安備44030402000607
公網安備44030402000607





