
集成化基極驅動電路
發布時間:2013/5/27 20:29:17 訪問次數:1142
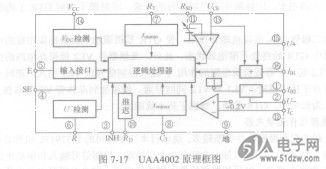
基極驅動電路的集成化克服E6C2-AN2E了獨立元器件驅動電路的電路元件多、電路復雜、穩定性欠佳、使用不便等缺點,同時保護功能更加豐富。法國THOMSON公司的UAA4002具有代表性,其原理框圖如圖7-17所示。其輸入信號的方式有兩種:由設置端SE(④腳)的電平決定,SE端為高電平時為電平輸入方式,低電平時為脈沖輸入方式。其輸出為+0.5A、-3A的基極驅動電流,根據用戶需要還可以外接晶體管以擴大輸出能力。該集成芯片有豐富的保護功能,現以圖7-18實用的8A、400V開關電路為例說明之。
(1)限流。在電源負回線中串接O.lQ電阻,用來檢測GTR的集電極電流,并將該信號引入芯片L端(⑩腳),當該信號電壓低于-0.2V時,比較器狀態發生變化,由邏輯處理器檢測并發出封鎖信號,封鎖輸出脈沖使GTR關斷。
(2)防止減飽和。GTR的集電極電壓由二極管VD來檢測,其正極接芯片UCE端(⑩腳),負極接GTR的集電極,在GTR開通時比較器檢測UCE端的電壓,若高于RD端(⑩腳)上的設定電壓,比較器則向邏輯處理器發出信號,處理器封鎖控制輸入,可防止GTR因基極電流不足或集電極電流過載引起減飽和的可能性。
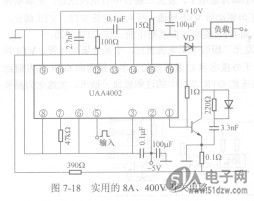
(3)導通時間間隔控制。為了確保GTR開關輔助網絡的電容充分放電,邏輯處理器應保證輸出脈沖有一最小脈寬ton mi。,其數值由Rr端(⑦腳)的電阻47kQ來決定。為了限制斬波電路的輸送功率或防止脈沖控制方式因傳輸信號中斷造成持續導通,還必須控制最大導通時間ton max,可通過C,端(⑧腳)的外接電容來調整。
(4)電源電壓檢測。可利用Vc。端【⑧腳)檢測正電源電壓的大小,當電源電壓小于7V時確保芯片UAA4002無輸出信號。負電壓的檢測可在U-端(②腳)與R-端(⑥腳)之間外接電阻來實現。
(5)時延功能。可以通過在RD端(⑩腳)接電阻來調整,使控制電壓前后沿間能保持1~20ys的固定的時間間隔。
(6)熱保護。UAA4002芯片在溫度超過150℃時能自動切斷輸出脈沖,而當芯片溫度降至極限值以下時恢復輸出。
除上述功能外,芯片還具有自動刪除功能等。
基極驅動電路的集成化克服E6C2-AN2E了獨立元器件驅動電路的電路元件多、電路復雜、穩定性欠佳、使用不便等缺點,同時保護功能更加豐富。法國THOMSON公司的UAA4002具有代表性,其原理框圖如圖7-17所示。其輸入信號的方式有兩種:由設置端SE(④腳)的電平決定,SE端為高電平時為電平輸入方式,低電平時為脈沖輸入方式。其輸出為+0.5A、-3A的基極驅動電流,根據用戶需要還可以外接晶體管以擴大輸出能力。該集成芯片有豐富的保護功能,現以圖7-18實用的8A、400V開關電路為例說明之。
(1)限流。在電源負回線中串接O.lQ電阻,用來檢測GTR的集電極電流,并將該信號引入芯片L端(⑩腳),當該信號電壓低于-0.2V時,比較器狀態發生變化,由邏輯處理器檢測并發出封鎖信號,封鎖輸出脈沖使GTR關斷。
(2)防止減飽和。GTR的集電極電壓由二極管VD來檢測,其正極接芯片UCE端(⑩腳),負極接GTR的集電極,在GTR開通時比較器檢測UCE端的電壓,若高于RD端(⑩腳)上的設定電壓,比較器則向邏輯處理器發出信號,處理器封鎖控制輸入,可防止GTR因基極電流不足或集電極電流過載引起減飽和的可能性。
(3)導通時間間隔控制。為了確保GTR開關輔助網絡的電容充分放電,邏輯處理器應保證輸出脈沖有一最小脈寬ton mi。,其數值由Rr端(⑦腳)的電阻47kQ來決定。為了限制斬波電路的輸送功率或防止脈沖控制方式因傳輸信號中斷造成持續導通,還必須控制最大導通時間ton max,可通過C,端(⑧腳)的外接電容來調整。
(4)電源電壓檢測。可利用Vc。端【⑧腳)檢測正電源電壓的大小,當電源電壓小于7V時確保芯片UAA4002無輸出信號。負電壓的檢測可在U-端(②腳)與R-端(⑥腳)之間外接電阻來實現。
(5)時延功能。可以通過在RD端(⑩腳)接電阻來調整,使控制電壓前后沿間能保持1~20ys的固定的時間間隔。
(6)熱保護。UAA4002芯片在溫度超過150℃時能自動切斷輸出脈沖,而當芯片溫度降至極限值以下時恢復輸出。
除上述功能外,芯片還具有自動刪除功能等。
 相關技術資料
相關技術資料- 5-27集成化基極驅動電路
- 相關IC型號
- E6C2-AN2E
- 暫無最新型號
 公網安備44030402000607
公網安備44030402000607





