
反饋的分類
發布時間:2013/10/16 20:05:35 訪問次數:1902
在實際放大電路中,ATTINY48-AU可以根據不同的要求引入各種不同類型的反饋。反饋的分類方法也有多種,下面分別介紹。
1.正反饋和負反饋
根據反饋的極性不同,可以分為正反饋和負反饋,在圖3.1.1中,引入反饋后,若原輸入信號和反饋信號疊加的結果是使凈輸入減小(z。<Xi),從而使閉環增益減小,則為負反饋,負反饋可改善放大器多方面的性能,在放大器中有廣泛的應用;反之(l-d >X),則為正反饋,一般來說,正反饋主要應用于信號的產生和變換電路,很少在放大器中單獨使用。
2.局部反饋與越級反饋
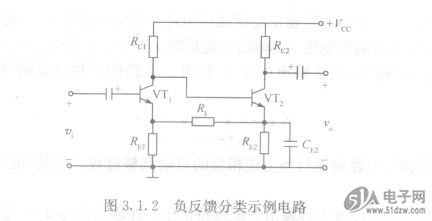
反饋網絡在電路中的明顯特征是跨接在輸入回路和輸出回路之間,例如在圖3.1.2中,就有3個反饋網絡:①是R。,,接在第一級輸出與輸入之間,②是RF2,跨接在第二級輸出與輸入之間,③是J52。和RE1,跨接在第二級輸出與第一級輸入之間。反饋①和反饋②屬于局部反饋,反饋③屬于越級反饋,由于越級反饋引入的反饋深度比局部反饋深,反饋效果較明顯,所以通常當局部反饋與越級反饋共存時,只討論越級反饋。
3.直流反饋與交流反饋
在反饋信號中存在直流成分,稱為直沆反饋;存在交流成分,稱為交流反饋。通常電路中直流反饋的作用是穩定靜態工作點,對動態性能沒有影響,所以一般情況只討論交流反饋及其對電路性能的影響。例如在圖3.1.2中,反饋①既有交流反饋又有直流反饋,只討論交流反饋,反饋②、③只有直流反饋,不做討論。
在實際放大電路中,ATTINY48-AU可以根據不同的要求引入各種不同類型的反饋。反饋的分類方法也有多種,下面分別介紹。
1.正反饋和負反饋
根據反饋的極性不同,可以分為正反饋和負反饋,在圖3.1.1中,引入反饋后,若原輸入信號和反饋信號疊加的結果是使凈輸入減小(z。<Xi),從而使閉環增益減小,則為負反饋,負反饋可改善放大器多方面的性能,在放大器中有廣泛的應用;反之(l-d >X),則為正反饋,一般來說,正反饋主要應用于信號的產生和變換電路,很少在放大器中單獨使用。
2.局部反饋與越級反饋
反饋網絡在電路中的明顯特征是跨接在輸入回路和輸出回路之間,例如在圖3.1.2中,就有3個反饋網絡:①是R。,,接在第一級輸出與輸入之間,②是RF2,跨接在第二級輸出與輸入之間,③是J52。和RE1,跨接在第二級輸出與第一級輸入之間。反饋①和反饋②屬于局部反饋,反饋③屬于越級反饋,由于越級反饋引入的反饋深度比局部反饋深,反饋效果較明顯,所以通常當局部反饋與越級反饋共存時,只討論越級反饋。
3.直流反饋與交流反饋
在反饋信號中存在直流成分,稱為直沆反饋;存在交流成分,稱為交流反饋。通常電路中直流反饋的作用是穩定靜態工作點,對動態性能沒有影響,所以一般情況只討論交流反饋及其對電路性能的影響。例如在圖3.1.2中,反饋①既有交流反饋又有直流反饋,只討論交流反饋,反饋②、③只有直流反饋,不做討論。
 相關技術資料
相關技術資料- 10-16反饋的分類
熱門點擊
- 數字集成電路的延遲時間
- 面包板插接的技巧
- 中頻頻率的調整
- 利用示波器的X-Y功能進行測量
- 觸發器真值表
- 用萬用表判別三端固定集成穩壓器的引腳
- 數字式萬用表的工作原理
- 集成寄存器及其應用
- 反饋的分類
- 集成運算放大器的調試
推薦技術資料

- 循線機器人是機器人入門和
- 循線機器人是機器人入門和比賽最常用的控制方式,E48S... [詳細]
 公網安備44030402000607
公網安備44030402000607





