
可以鎖定目標的2自由度光電跟蹤頭
發布時間:2013/11/12 20:02:56 訪問次數:800
話說筆者還是個FPS游戲玩家,AT7911EFA-E這個光電跟蹤頭的結構設計受(使命召喚6:現代戰爭2(MW2)》中自動機槍的啟發,采用了比較復雜的連桿機構。這樣的結構使這個機器人運動的效果帶有一點超現實色彩。想象一下吧,在自己家的桌子上擺這么一個東西,那些游戲發燒友們看到它時的表情一定很精彩!
自由度光電跟蹤頭的整體制作仍然貫徹以往的制作方針,即低成本、高趣味性和藝術性。跟蹤頭的核心部分由兩個獨立的神經元電路分別控制的兩個電機組成,因為采用了比較高緞的模擬神經元電路,相對于前一個以數字邏輯控制的跟蹤頭,它的運動變得更加“聰明”。
光電跟蹤頭使用兩只電機驅動,在制作上增加了不小的難度。但是對于喜歡動手制作的“魔術師”來說,有難度才有激情!引用《妙警賊探》里的一句話,就是:“It makes the world go round(是激情讓地球運轉的)。”
下面正式開始制作這個2自由度光電跟蹤頭。
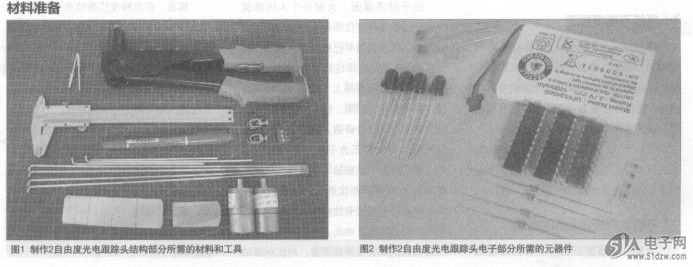
光電跟蹤頭感光元件的選擇方法參見《超簡單的單自由度光電跟蹤頭》-文。
74HC240在這里作為兩組神經元電路使用,為了使神經元可以驅動減速電機,還需要配備雙向電機驅動電路。我在制作中使用的是74HC245_態總線收發器,你也可以使用74HC240、以分立元件構成的H橋,或其他專用的電機驅動IC。
74HC245是我個人比較喜歡的一塊代用型雙向電機驅動芯片。和74HC240一樣,它里面的每個緩>中器的輸出電流也是±35mA,為了驅動電機,同樣需要多組緩>中器并聯使用。它的優點是芯片以把它改裝成一塊不錯的雙向電機驅動模塊。
74HC245的跳線方式見圖3。因為是收發器,這個電路有兩種方向不同的接法,這使得芯片上的纏繞焊接變得非常靈活,你可以選擇讓芯片的正面或背面露在外面(從美觀和藝術的角度考慮)。
圖3左側是我常用的接法。第10、1 9腳的接地線可以在芯片背面做一根跳線,第1、20腳電源正極的跳線可以做在芯片側面。兩只電機的4路輸入、輸出布局很清晰,將對應引腳就近短接在一起就可以了。單個芯片連接,電機每相的最大電流是±70mA,稍顯不足,一般要把兩片74HC245井聯起來使用。
74HC245內部集成了1 6個緩沖器,由第1、1 9腳的使能端進行選通控制。如
電機為小型機器人常用的中型減速電機,標稱電壓6V,要求電機的轉速低于30dmin。這次使用中型電機是從整體設計考慮的,你也可以用N20電機制作一個縮小版。電路使用一塊3.7V的鋰電池供電,電機實際工作時的轉速還會更低。
端子芯取自工業連接器里面的接線排座。端子芯的結構和使用方法參見前面的文章。從常見的藍色接線端子里拆出的銅
芯如圖4所示。
空氣開關的端子作為電機軸連器使用,這次我使用的電機輸出軸頸為5mm,只有空氣開關這種大電流器件里面的端子才能保證足夠的安裝空間。
鋰電池和充電器的介紹見上期文章中的內容。機器人使用兩位鍍金排針、排座作為充電接口。
話說筆者還是個FPS游戲玩家,AT7911EFA-E這個光電跟蹤頭的結構設計受(使命召喚6:現代戰爭2(MW2)》中自動機槍的啟發,采用了比較復雜的連桿機構。這樣的結構使這個機器人運動的效果帶有一點超現實色彩。想象一下吧,在自己家的桌子上擺這么一個東西,那些游戲發燒友們看到它時的表情一定很精彩!
自由度光電跟蹤頭的整體制作仍然貫徹以往的制作方針,即低成本、高趣味性和藝術性。跟蹤頭的核心部分由兩個獨立的神經元電路分別控制的兩個電機組成,因為采用了比較高緞的模擬神經元電路,相對于前一個以數字邏輯控制的跟蹤頭,它的運動變得更加“聰明”。
光電跟蹤頭使用兩只電機驅動,在制作上增加了不小的難度。但是對于喜歡動手制作的“魔術師”來說,有難度才有激情!引用《妙警賊探》里的一句話,就是:“It makes the world go round(是激情讓地球運轉的)。”
下面正式開始制作這個2自由度光電跟蹤頭。
光電跟蹤頭感光元件的選擇方法參見《超簡單的單自由度光電跟蹤頭》-文。
74HC240在這里作為兩組神經元電路使用,為了使神經元可以驅動減速電機,還需要配備雙向電機驅動電路。我在制作中使用的是74HC245_態總線收發器,你也可以使用74HC240、以分立元件構成的H橋,或其他專用的電機驅動IC。
74HC245是我個人比較喜歡的一塊代用型雙向電機驅動芯片。和74HC240一樣,它里面的每個緩>中器的輸出電流也是±35mA,為了驅動電機,同樣需要多組緩>中器并聯使用。它的優點是芯片以把它改裝成一塊不錯的雙向電機驅動模塊。
74HC245的跳線方式見圖3。因為是收發器,這個電路有兩種方向不同的接法,這使得芯片上的纏繞焊接變得非常靈活,你可以選擇讓芯片的正面或背面露在外面(從美觀和藝術的角度考慮)。
圖3左側是我常用的接法。第10、1 9腳的接地線可以在芯片背面做一根跳線,第1、20腳電源正極的跳線可以做在芯片側面。兩只電機的4路輸入、輸出布局很清晰,將對應引腳就近短接在一起就可以了。單個芯片連接,電機每相的最大電流是±70mA,稍顯不足,一般要把兩片74HC245井聯起來使用。
74HC245內部集成了1 6個緩沖器,由第1、1 9腳的使能端進行選通控制。如
電機為小型機器人常用的中型減速電機,標稱電壓6V,要求電機的轉速低于30dmin。這次使用中型電機是從整體設計考慮的,你也可以用N20電機制作一個縮小版。電路使用一塊3.7V的鋰電池供電,電機實際工作時的轉速還會更低。
端子芯取自工業連接器里面的接線排座。端子芯的結構和使用方法參見前面的文章。從常見的藍色接線端子里拆出的銅
芯如圖4所示。
空氣開關的端子作為電機軸連器使用,這次我使用的電機輸出軸頸為5mm,只有空氣開關這種大電流器件里面的端子才能保證足夠的安裝空間。
鋰電池和充電器的介紹見上期文章中的內容。機器人使用兩位鍍金排針、排座作為充電接口。
上一篇:校準操作實驗戰經驗
上一篇:2自由度光電跟蹤頭的電子部分構成
 相關技術資料
相關技術資料- 11-12可以鎖定目標的2自由度光電跟蹤頭
- 11-11光纖維通信的特點及應用
- 相關IC型號
- AT7911EFA-E
- 暫無最新型號
熱門點擊

 公網安備44030402000607
公網安備44030402000607





