
機器人視覺與觸覺的融合在智能機器人中
發布時間:2014/12/2 19:04:45 訪問次數:2101
機器人視覺與觸覺的融合在智能機器人中,手眼系統是最具有代表性的,通過這AD8611ARZ些機器人可以進行物體的識別、測量和控制。由于有了可以進行觸摸的機械手,可以用視覺信息引導觸覺系統的運動,同時觸覺系統反過來又能驗證視覺系統的結果。圖5-50所示是一個典型的手眼系統,可以用來識別普通的沒有明顯紋理特征及顏色相近的物品,這對于單純的視覺系統來說是非常困難的。如果這時只利用視覺識別系統,那么就會缺少用以匹配及深度分析的特征。通過融合視覺信息和觸覺信息可以有效地識別洞、坑和曲面形狀等信息。
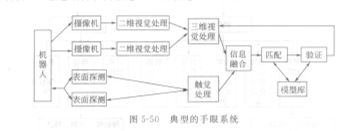
這種手眼系統的一殷工作可分為如下五個步驟。
①利用二維視覺處理技術確定邊界區域,利用立體視覺確定物體的質心,由此作為觸覺探測的起點,同時立體視覺可以提供對深度和朝向的初步計算結果,并除去由遮攔、噪聲等原因形成的孤立特征。在只有視覺處理的系統中,對于非稠密的深度只有通過內插來估計。借助于觸覺可以大大提高內插的精度。
②利用觸覺系統進一步檢查視覺系統識別到每個區域,以決定其是表面還是洞或坑。
③對于平滑區域,利用視覺和前面觸覺的結果以及當前的觸覺信息相融合,生成與模型數據庫相匹配的三維表面,從與表面相連的位置開始。觸覺通道利用結點決定表面蹤跡的方向,將這些點沿著每條蹤跡連接成閉合曲線,用以補充立體視覺處理過程中獲取的信息。
④利用表面和閉合曲線(對應孔或坑)與模型數據庫相匹配,得到與傳感信息一致的物體。如果一致的物體是多個,那么用概率測量,需要驗證的物體進行排隊。
⑤一旦確定了與數據庫對應的物體,下一步需要對未被感知的特征進行驗證。對于視覺上被遮擋的洞和坑就需要用觸覺感知來檢測,但只靠觸覺感很難的,因此視覺檢測在這里所起的作用是對觸覺系統的引導和確定,需要觸覺探測的區域。
機器人視覺與觸覺的融合在智能機器人中,手眼系統是最具有代表性的,通過這AD8611ARZ些機器人可以進行物體的識別、測量和控制。由于有了可以進行觸摸的機械手,可以用視覺信息引導觸覺系統的運動,同時觸覺系統反過來又能驗證視覺系統的結果。圖5-50所示是一個典型的手眼系統,可以用來識別普通的沒有明顯紋理特征及顏色相近的物品,這對于單純的視覺系統來說是非常困難的。如果這時只利用視覺識別系統,那么就會缺少用以匹配及深度分析的特征。通過融合視覺信息和觸覺信息可以有效地識別洞、坑和曲面形狀等信息。
這種手眼系統的一殷工作可分為如下五個步驟。
①利用二維視覺處理技術確定邊界區域,利用立體視覺確定物體的質心,由此作為觸覺探測的起點,同時立體視覺可以提供對深度和朝向的初步計算結果,并除去由遮攔、噪聲等原因形成的孤立特征。在只有視覺處理的系統中,對于非稠密的深度只有通過內插來估計。借助于觸覺可以大大提高內插的精度。
②利用觸覺系統進一步檢查視覺系統識別到每個區域,以決定其是表面還是洞或坑。
③對于平滑區域,利用視覺和前面觸覺的結果以及當前的觸覺信息相融合,生成與模型數據庫相匹配的三維表面,從與表面相連的位置開始。觸覺通道利用結點決定表面蹤跡的方向,將這些點沿著每條蹤跡連接成閉合曲線,用以補充立體視覺處理過程中獲取的信息。
④利用表面和閉合曲線(對應孔或坑)與模型數據庫相匹配,得到與傳感信息一致的物體。如果一致的物體是多個,那么用概率測量,需要驗證的物體進行排隊。
⑤一旦確定了與數據庫對應的物體,下一步需要對未被感知的特征進行驗證。對于視覺上被遮擋的洞和坑就需要用觸覺感知來檢測,但只靠觸覺感很難的,因此視覺檢測在這里所起的作用是對觸覺系統的引導和確定,需要觸覺探測的區域。
上一篇:硬件的組成及完成功能
上一篇:視覺檢測在生產線上的應用
 相關技術資料
相關技術資料- 12-2機器人視覺與觸覺的融合在智能機器人中
熱門點擊
- 差動變壓器式傳感器的應用
- 磁阻元件的主要特性
- 應變極限和疲勞壽命應變片的線性
- 霍爾傳感器的差動放大電路
- 階梯特性、階梯誤差、分辨率
- 機器人視覺與觸覺的融合在智能機器人中
- 在Multisim中添加LabVIEW交互接
- 逐漸形成了多層次ISP結構的因特網
- 脈沖盤式編碼器
- 瞬態響應特性傳感器的瞬態響應是時間響應
推薦技術資料
- 單片機版光立方的制作
- N視頻: http://v.youku.comN_sh... [詳細]
 公網安備44030402000607
公網安備44030402000607





