
ESC11SE62041P60尾翼的組成垂直安定面
發布時間:2019/11/16 21:21:08 訪問次數:3795
ESC11SE62041P60增量對飛機重心形成的力矩是低頭力矩,阻止飛機抬頭水平距離飛機重心最遠,氣動力面積最大,所以,俯仰阻尼力矩主要由水平尾翼產生尾翼(見圖4-8)。
縱向擾動運動的模態及其特征,定常直線飛行的飛機受到擾動后,在回到原平衡姿態過程中產生的擾動運動可以簡化看成是由兩種典型周期性運動模態疊加而成:一種是周期很短、衰減很快的短周期模態,如圖4-9所示;另一種是周期長、衰減很慢的長周期模態,如圖4-10所示。
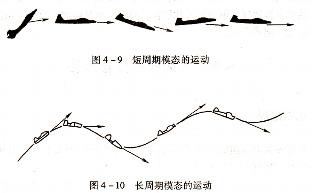
短周期模態的運動,長周期模態的運動
短周期運動模態,這種運動模態主要發生在干擾消失后的最初階段。飛枧的擾動運動主要是飛機繞重心的擺動過程,表現為迎角和俯仰角速度周期性迅速變化,雨飛行速度則基本上保持不變。
擾動消失的最初階段,飛機上產生的靜穩定力矩迫使飛機返回原飛行姿態,從而使飛機產生較大的繞橫軸轉動的角加速度9使飛機的迎角和俯仰角速度迅速變化。到達原平衡姿態時,由于運動慣性,飛機會繼續轉動并超過原平衡位置,又會產生方向相反的靜穩定力矩,迫使飛機再回到原飛行姿態,從而使飛機產生相反方向的轉動角加速度,使飛機的迎角和俯仰角速度又向相反的方向迅速變化。于是,就形成了迎角和俯仰角速度周期性迅速變化的短周期運動模態。在俯仰擺動過程中,飛機上的氣動力分布產生與飛機轉動角速度方向相反的較大的俯仰阻尼力矩(見圖4-8),使飛機的俯仰擺動很快衰減下來。一般情況下,飛機的這種短期振蕩運動在開始的頭幾秒內就基本結束了。飛機上的縱向力矩也基本恢復到原來的平衡狀態,擾動運動過程如圖4-9所示。
長周期運動模態,這種運動模態主要發生在擾動運動的后一階段。飛機的擾動運動主要是飛機重心運動的振蕩過程,表現為飛行速度和航跡傾斜角周期性的緩慢變化,飛機的迎角基本恢復到原來的迎角并保持不變。
在短周期振蕩運動基本結束時,縱向力矩基本恢復平衡,飛機基本不再繞橫軸轉動,但由于飛行速度增量的作用,作用在飛機上的外力仍處于不平衡狀態,飛機的航跡是彎曲的。重力、升力、阻力和發動機推力的相互作用,使飛機的高度增加,速度和升力隨之減小,航跡逐漸轉為向下彎曲;隨后,飛機的高度減小,速度和升力隨之增加,航跡又逐漸轉為向土彎曲。如此反復進行,就形成了飛機重心上、下緩慢振蕩。振蕩過程如圖4-10所示。這一振蕩過程衰減很慢,形成長周期運動模態。
在飛行過程中,駕駛員對這兩種運動模態的感覺和要求是不同的。對于短周期模態,運動參數迎角、俯仰角速度變化快,駕駛員往往來不及反應并予以制止,因而影響到飛行安全、乘員的舒適和操縱反應特性等,所以對這種模態提出的要求較高。為了保證飛行的安全,CCAR-25部規定:在主操縱處于松浮狀態或固定狀態時,在相應于飛機形態的失速速度與最大允許速度之間產生的任何短周期振蕩,必須受到重阻尼。對于長周期模態,因為它振蕩周期長,運動參數速度、航跡角變化緩慢,駕駛員有足夠的時間進行糾正,所以對這種模態特性的要求就比前者要低。
飛機的縱向操縱性,水平尾翼,飛機的水平尾翼是由前面的固定不動(或安裝角可調)的水平安定面和后面可繞轉軸偏轉的升降舵組成,如圖4-11所示。

當升降舵偏轉或調整水平安定面的配平角時,產生的附加升力對飛機重心形成了附加的縱向力矩,以保持飛機在不同狀態下的縱向平衡和對飛機進行縱向操縱。升降舵偏角用εz表示,規定當舵面后緣向下偏轉時,εz>0,后緣向上偏轉時,εz<<>0。
飛機的縱向操縱,飛機的縱向操縱是由駕駛員通過駕駛桿、傳動系統等改變升降舵的偏轉角來實現的。
根據駕駛員的生理習慣,正常的操作動作是:駕駛員向前推桿,舵面應向下偏轉(εz>0),平尾上產生的附力Ⅱ升力向上,對重心產生的附加縱向力矩Δmz<0,迫使飛機低頭,減小迎角,增大飛行速度;駕駛員向后拉桿,舵面應向上偏轉(εz<0),
平尾上產生的附加升力向下,對重心產生的附加縱向力矩Δmz>0,迫使飛機抬頭,增大迎角,減少飛行速度,如圖4-12所示。由此可知,升降舵偏角εz與所產生的附加力矩Δmz的符號相反。
水平尾翼另一個重要作用是對飛機進行縱向操縱。尾翼的組成垂直安定面.
ESC11SE62041P60增量對飛機重心形成的力矩是低頭力矩,阻止飛機抬頭水平距離飛機重心最遠,氣動力面積最大,所以,俯仰阻尼力矩主要由水平尾翼產生尾翼(見圖4-8)。
縱向擾動運動的模態及其特征,定常直線飛行的飛機受到擾動后,在回到原平衡姿態過程中產生的擾動運動可以簡化看成是由兩種典型周期性運動模態疊加而成:一種是周期很短、衰減很快的短周期模態,如圖4-9所示;另一種是周期長、衰減很慢的長周期模態,如圖4-10所示。
短周期模態的運動,長周期模態的運動
短周期運動模態,這種運動模態主要發生在干擾消失后的最初階段。飛枧的擾動運動主要是飛機繞重心的擺動過程,表現為迎角和俯仰角速度周期性迅速變化,雨飛行速度則基本上保持不變。
擾動消失的最初階段,飛機上產生的靜穩定力矩迫使飛機返回原飛行姿態,從而使飛機產生較大的繞橫軸轉動的角加速度9使飛機的迎角和俯仰角速度迅速變化。到達原平衡姿態時,由于運動慣性,飛機會繼續轉動并超過原平衡位置,又會產生方向相反的靜穩定力矩,迫使飛機再回到原飛行姿態,從而使飛機產生相反方向的轉動角加速度,使飛機的迎角和俯仰角速度又向相反的方向迅速變化。于是,就形成了迎角和俯仰角速度周期性迅速變化的短周期運動模態。在俯仰擺動過程中,飛機上的氣動力分布產生與飛機轉動角速度方向相反的較大的俯仰阻尼力矩(見圖4-8),使飛機的俯仰擺動很快衰減下來。一般情況下,飛機的這種短期振蕩運動在開始的頭幾秒內就基本結束了。飛機上的縱向力矩也基本恢復到原來的平衡狀態,擾動運動過程如圖4-9所示。
長周期運動模態,這種運動模態主要發生在擾動運動的后一階段。飛機的擾動運動主要是飛機重心運動的振蕩過程,表現為飛行速度和航跡傾斜角周期性的緩慢變化,飛機的迎角基本恢復到原來的迎角并保持不變。
在短周期振蕩運動基本結束時,縱向力矩基本恢復平衡,飛機基本不再繞橫軸轉動,但由于飛行速度增量的作用,作用在飛機上的外力仍處于不平衡狀態,飛機的航跡是彎曲的。重力、升力、阻力和發動機推力的相互作用,使飛機的高度增加,速度和升力隨之減小,航跡逐漸轉為向下彎曲;隨后,飛機的高度減小,速度和升力隨之增加,航跡又逐漸轉為向土彎曲。如此反復進行,就形成了飛機重心上、下緩慢振蕩。振蕩過程如圖4-10所示。這一振蕩過程衰減很慢,形成長周期運動模態。
在飛行過程中,駕駛員對這兩種運動模態的感覺和要求是不同的。對于短周期模態,運動參數迎角、俯仰角速度變化快,駕駛員往往來不及反應并予以制止,因而影響到飛行安全、乘員的舒適和操縱反應特性等,所以對這種模態提出的要求較高。為了保證飛行的安全,CCAR-25部規定:在主操縱處于松浮狀態或固定狀態時,在相應于飛機形態的失速速度與最大允許速度之間產生的任何短周期振蕩,必須受到重阻尼。對于長周期模態,因為它振蕩周期長,運動參數速度、航跡角變化緩慢,駕駛員有足夠的時間進行糾正,所以對這種模態特性的要求就比前者要低。
飛機的縱向操縱性,水平尾翼,飛機的水平尾翼是由前面的固定不動(或安裝角可調)的水平安定面和后面可繞轉軸偏轉的升降舵組成,如圖4-11所示。
當升降舵偏轉或調整水平安定面的配平角時,產生的附加升力對飛機重心形成了附加的縱向力矩,以保持飛機在不同狀態下的縱向平衡和對飛機進行縱向操縱。升降舵偏角用εz表示,規定當舵面后緣向下偏轉時,εz>0,后緣向上偏轉時,εz<<>0。
飛機的縱向操縱,飛機的縱向操縱是由駕駛員通過駕駛桿、傳動系統等改變升降舵的偏轉角來實現的。
根據駕駛員的生理習慣,正常的操作動作是:駕駛員向前推桿,舵面應向下偏轉(εz>0),平尾上產生的附力Ⅱ升力向上,對重心產生的附加縱向力矩Δmz<0,迫使飛機低頭,減小迎角,增大飛行速度;駕駛員向后拉桿,舵面應向上偏轉(εz<0),
平尾上產生的附加升力向下,對重心產生的附加縱向力矩Δmz>0,迫使飛機抬頭,增大迎角,減少飛行速度,如圖4-12所示。由此可知,升降舵偏角εz與所產生的附加力矩Δmz的符號相反。
水平尾翼另一個重要作用是對飛機進行縱向操縱。尾翼的組成垂直安定面.
 相關技術資料
相關技術資料- 11-28最新集成傳感激光測距模塊規格參數技術應用
- 11-28Supermicro NVIDIA HGX B200系統參數應用設
- 11-28新一代 ToF 激光測距傳感器詳細探討
- 11-28全新 Riedon™ 功率電阻產品系列
- 11-28分流電阻的檢測原理及市場格局
- 11-28前沿技術AI輔助診斷應用新進展
- 11-2712位模數轉換器 (ADC)參數特點技術封裝
- 11-27三角函數加速器 (TMU)系列
- 11-27單芯片“艙行泊”一體化方案探究
- 11-27CoolSiC肖特基二極管技術參數應用設計
- 11-27納微GaN Safe系列NV6515(650V,32mΩ max)IC
- 11-27臨界導通模式(CrM)詳情
 公網安備44030402000607
公網安備44030402000607





