
VI-B6K-IU 驅動裝置的特點
發布時間:2019/12/19 8:55:28 訪問次數:2322
VI-B6K-IU圖5.4-9所示為采用電驅動的水平安定面配平系統示意圖。駕駛員根據實際飛機飛行狀態操縱配平電門,通過控制電路,使電動機工作,電動機帶動齒輪箱轉動,驅動絲桿轉動。絲桿上的球形螺母驅動水平安定面托架帶動水平安定面偏轉。水平安定面位置傳感器將安定面的位置信號反饋給位置指示器,駕駛員根據指示器判斷水平安定面的實際位置,進行調整,當操縱面運動到規定位置時,駕駛員停止操縱。

配平指示,配平安定面,配平手輪駕駛桿,轉換組件,前鋼索鼓輪升鋼索,水平安定面的配平操縱.
需要注意的是,操縱電門一般采用彈簧加載的定中電門,松開電門,電門會自動回到關斷位,電動機停止工作。同時在電動操縱系統中,往往帶有一些極限位置電門,當操縱面運動到極限位時,位置電門將使控制電路斷開,防止操縱面運動超過極限位置,引發安全問題。
典型飛機操縱系統,主飛行操縱系統與輔助操縱系統的區別.
在人工飛行操縱系統中,通常分為主操縱系統和輔助操縱系統。主操縱系統是指驅動副翼、升降舵和方向舵,使飛機產生圍繞縱軸、橫軸、立軸轉動的系統,圖5.5-1所示為主操縱系統的簡單原理圖。其他驅動擾流板、前緣裝置、后緣襟翼和水平安定面配平等輔助操縱面的操縱系統均稱為輔助操縱系統,如圖5.5-2所示。
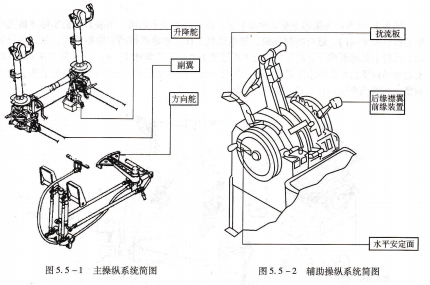
主操縱系統簡圖,輔助操縱系統簡圖,飛機輔助操縱系統與主操縱系統不同,后者必須給駕駛員有操縱力和位移的感覺,而前者則沒有。但駕駛員必須知道輔助操縱面的位置,故需要位置指示器或指示燈。
由于驅動裝置本身的特點,輔助操縱系統在工作申,當操縱面被操縱到需要的位置后,不會在空氣動力作用下返回原來位置。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
VI-B6K-IU圖5.4-9所示為采用電驅動的水平安定面配平系統示意圖。駕駛員根據實際飛機飛行狀態操縱配平電門,通過控制電路,使電動機工作,電動機帶動齒輪箱轉動,驅動絲桿轉動。絲桿上的球形螺母驅動水平安定面托架帶動水平安定面偏轉。水平安定面位置傳感器將安定面的位置信號反饋給位置指示器,駕駛員根據指示器判斷水平安定面的實際位置,進行調整,當操縱面運動到規定位置時,駕駛員停止操縱。
配平指示,配平安定面,配平手輪駕駛桿,轉換組件,前鋼索鼓輪升鋼索,水平安定面的配平操縱.
需要注意的是,操縱電門一般采用彈簧加載的定中電門,松開電門,電門會自動回到關斷位,電動機停止工作。同時在電動操縱系統中,往往帶有一些極限位置電門,當操縱面運動到極限位時,位置電門將使控制電路斷開,防止操縱面運動超過極限位置,引發安全問題。
典型飛機操縱系統,主飛行操縱系統與輔助操縱系統的區別.
在人工飛行操縱系統中,通常分為主操縱系統和輔助操縱系統。主操縱系統是指驅動副翼、升降舵和方向舵,使飛機產生圍繞縱軸、橫軸、立軸轉動的系統,圖5.5-1所示為主操縱系統的簡單原理圖。其他驅動擾流板、前緣裝置、后緣襟翼和水平安定面配平等輔助操縱面的操縱系統均稱為輔助操縱系統,如圖5.5-2所示。
主操縱系統簡圖,輔助操縱系統簡圖,飛機輔助操縱系統與主操縱系統不同,后者必須給駕駛員有操縱力和位移的感覺,而前者則沒有。但駕駛員必須知道輔助操縱面的位置,故需要位置指示器或指示燈。
由于驅動裝置本身的特點,輔助操縱系統在工作申,當操縱面被操縱到需要的位置后,不會在空氣動力作用下返回原來位置。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
 相關技術資料
相關技術資料- 11-23模擬和混合信號平臺Treo詳情
- 11-23PXI和LXI模塊化解決方案解讀
- 11-23AN-13-0004_CAN收發器結構參數特點應用設計
- 11-23屏蔽柵槽溝技術 (SGT)主要特性及功能應用
- 11-23第一代SGT MOSFET系列技術結構參數封裝
- 11-23全球首顆GSE DPU芯片發布
- 11-22新一代5G-A模組RG650V-NA結構技術參數應用及需求分析
- 11-22電池儲能系統 (BESS)結構設計及解決方案
- 11-22全新高脈沖制動電阻系列參數技術應用設計
- 11-22Telcordia GR-468 CORE測試應用全
- 11-22DSP(數字信號處理器)系列介紹
- 11-22AI ISP的技術優勢和市場發展趨勢

 公網安備44030402000607
公網安備44030402000607





