
開關磁阻電動機的調速控制
發布時間:2012/6/9 14:45:45 訪問次數:986
SRM必須采用特殊的功率變換LT1367CS裝置及控制器與之相配合才能正常運行,即組成SRD,控制器接收啟動命令信號,在檢測系統狀態一切正常的情況下,根據位置傳感器提供的各相定子齒極和轉子齒極相對位置的信息,按照啟動邏輯給出相應的輸出信號。
SRD系統如圖11-3所示,SRD主要由SRM、功率變換器、控制器、位置檢測器等構成。
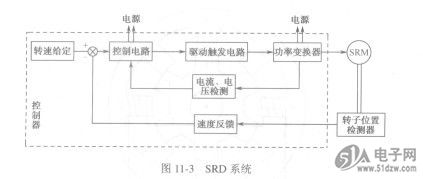
①功率變換器:其作用是將電源提供的能量經適當轉換后提供給SRM,由蓄電池或交流電整流后得到的直流電供電。由于SRM繞組電流是單向的,使得其功率變換器主電路不僅結構較簡單,而且相繞組與主開關器件是串聯的,因而可以避免直接短路故障,SRM的功率變換器主電路的結構形式與供電電壓、電動機相數及主開關器件的種類等有關。
②控制器:綜合處理速度指令、速度反饋信號電流傳感器及位置傳感器的反饋信息,控制功率變換器中主開關器件的工作狀態,實現對SRM運行狀態的控制。
③轉子位置檢測器:轉子位置檢測環節是SRD的重要組成部分,檢測到的轉子位置信號是各項主開關器件正確進行邏輯切換的根據,也為速度控制環節提供了速度反饋信號。
SRD的運行需要在線實時檢測的反饋量一般有轉子位置、速度及電流等,然后根據控制目標綜合這些信息給出控制指令,實現運行控制及保護等功能。
SRM的可控量較多,諸如相電壓、相電流、開通角和關斷角等參數,針對不同的控制變量衍生出各自不同的控制方式:電流斬波控制( CCC)、角度位置控制(APC)、電壓PWM控制。
SRM必須采用特殊的功率變換LT1367CS裝置及控制器與之相配合才能正常運行,即組成SRD,控制器接收啟動命令信號,在檢測系統狀態一切正常的情況下,根據位置傳感器提供的各相定子齒極和轉子齒極相對位置的信息,按照啟動邏輯給出相應的輸出信號。
SRD系統如圖11-3所示,SRD主要由SRM、功率變換器、控制器、位置檢測器等構成。
①功率變換器:其作用是將電源提供的能量經適當轉換后提供給SRM,由蓄電池或交流電整流后得到的直流電供電。由于SRM繞組電流是單向的,使得其功率變換器主電路不僅結構較簡單,而且相繞組與主開關器件是串聯的,因而可以避免直接短路故障,SRM的功率變換器主電路的結構形式與供電電壓、電動機相數及主開關器件的種類等有關。
②控制器:綜合處理速度指令、速度反饋信號電流傳感器及位置傳感器的反饋信息,控制功率變換器中主開關器件的工作狀態,實現對SRM運行狀態的控制。
③轉子位置檢測器:轉子位置檢測環節是SRD的重要組成部分,檢測到的轉子位置信號是各項主開關器件正確進行邏輯切換的根據,也為速度控制環節提供了速度反饋信號。
SRD的運行需要在線實時檢測的反饋量一般有轉子位置、速度及電流等,然后根據控制目標綜合這些信息給出控制指令,實現運行控制及保護等功能。
SRM的可控量較多,諸如相電壓、相電流、開通角和關斷角等參數,針對不同的控制變量衍生出各自不同的控制方式:電流斬波控制( CCC)、角度位置控制(APC)、電壓PWM控制。
上一篇:開關磁阻電動機的原理
上一篇:電沆斬波控制
 相關技術資料
相關技術資料- 6-9開關磁阻電動機的調速控制
熱門點擊
- 用于避障的傳感器
- 使用正負電源的射極跟隨器
- 開關器件采用MOSFET的電路
- P溝MOSFET的內藏二極管
- 使用石英振子
- 驅動電路用電源-DC-DC變換器部分的波形
- 確定偏置電路Ri,Rz
- 開關磁阻電動機的調速控制
- sw斷開時需要續流二極管
- 硬件組成
推薦技術資料
- 繪制印制電路板的過程
- 繪制印制電路板是相當重要的過程,EPL2010新穎的理... [詳細]
 公網安備44030402000607
公網安備44030402000607





