
引擎速度監視器電路
發布時間:2013/9/4 20:18:32 訪問次數:782
1.用 途
汽車、摩托車電路。
2.原 理
電路如圖3.4(a)所示。74HC563D監視器電路能夠在引擎轉速達到預定值時自動顯示。轉速預定值由電位器P.設置。
通過繼電器可以發出聲或光警報信號,甚至可以在關閉點火發動機的開關時發動機停車。
該電路不是基于普通的/、/U轉換器,而是建立在0.1Hz分辨率的偽數字測量理論基礎上的。
被測量的電壓經Ri、Cl、Di網絡限幅后輸入到Ti的基極。Ti輸出5V的矩形脈沖,這些脈沖加到可重復觸發的單穩態電路的IC1。的觸發端,使其輸出窄脈沖,這些脈沖下降沿觸發第二個單穩態電路IClb,其輸出脈沖的寬度為定值,由Pl設置。
信號波形圖如圖3.4(b)所示。IClb的輸出加到由與非門IC2b和IC2。組成的雙穩態電路。IC2。比較這兩個單穩態電路的輸出脈沖。在IClb輸出高電平期間,雙穩態電路被IC1。輸出的第二脈沖觸發而置位,輸出高電平。三極管T2導通,發光二極管發光,繼電器REi吸合。
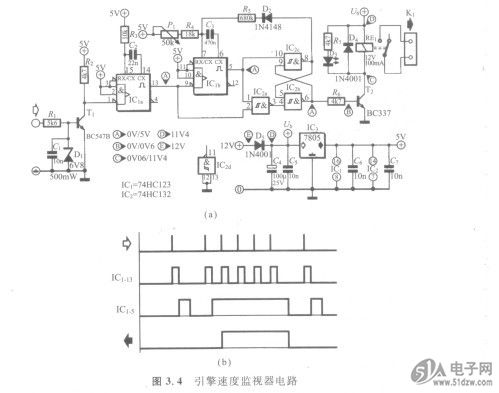
只有當引擎的速度下降到設置的門限值時,經過第二個單穩態時間后,雙穩態電路被IClb輸出的“0”復位,輸出邏輯“O”,三極管T2截止,發光二極管熄滅,繼電器REi釋放。
Rs、D2用于產生切換滯后,防止當速度在門限值附近變化時出現繼電器的“咔嗒”聲和發光二極管的閃爍。
當雙穩態IC2b輸出低電平時,Rs與R。和Pl并聯。當雙穩態IC2b輸出高電平時,定時電阻就只有R。和P.了。所以當引擎轉速超過設定值之后,ICZb輸出高電平,只有當引擎的轉速低于設定值以下某個值(100~150r/min),雙穩態電路才會反轉。這樣設置就保證了即使短暫的超速也會被清楚地指示出來。
該電路使用繼電器時,電路電流大約為llOmA,當僅使用發光二極管時,電流約為30mA。
電阻R。的值必須與要求的引擎速度適配,阻值為18kQ時,發動機的速度能通過Pl設置為2000~7800r/min。
用下式計算出引擎的轉速:
其中,以為轉速;cil為引擎缸數;m為2(2沖程的引擎)或者4(4沖程的引擎).為點火脈沖頻率。根據式(3.1)和式(3.2),可以得到R。和Pl的值。
電路的校準可以便用一臺數字頻率計和一臺脈沖信號發生器,調節脈沖頻率為設定轉速的對應頻率,調節P.使發光二極管發光即可。
1.用 途
汽車、摩托車電路。
2.原 理
電路如圖3.4(a)所示。74HC563D監視器電路能夠在引擎轉速達到預定值時自動顯示。轉速預定值由電位器P.設置。
通過繼電器可以發出聲或光警報信號,甚至可以在關閉點火發動機的開關時發動機停車。
該電路不是基于普通的/、/U轉換器,而是建立在0.1Hz分辨率的偽數字測量理論基礎上的。
被測量的電壓經Ri、Cl、Di網絡限幅后輸入到Ti的基極。Ti輸出5V的矩形脈沖,這些脈沖加到可重復觸發的單穩態電路的IC1。的觸發端,使其輸出窄脈沖,這些脈沖下降沿觸發第二個單穩態電路IClb,其輸出脈沖的寬度為定值,由Pl設置。
信號波形圖如圖3.4(b)所示。IClb的輸出加到由與非門IC2b和IC2。組成的雙穩態電路。IC2。比較這兩個單穩態電路的輸出脈沖。在IClb輸出高電平期間,雙穩態電路被IC1。輸出的第二脈沖觸發而置位,輸出高電平。三極管T2導通,發光二極管發光,繼電器REi吸合。
只有當引擎的速度下降到設置的門限值時,經過第二個單穩態時間后,雙穩態電路被IClb輸出的“0”復位,輸出邏輯“O”,三極管T2截止,發光二極管熄滅,繼電器REi釋放。
Rs、D2用于產生切換滯后,防止當速度在門限值附近變化時出現繼電器的“咔嗒”聲和發光二極管的閃爍。
當雙穩態IC2b輸出低電平時,Rs與R。和Pl并聯。當雙穩態IC2b輸出高電平時,定時電阻就只有R。和P.了。所以當引擎轉速超過設定值之后,ICZb輸出高電平,只有當引擎的轉速低于設定值以下某個值(100~150r/min),雙穩態電路才會反轉。這樣設置就保證了即使短暫的超速也會被清楚地指示出來。
該電路使用繼電器時,電路電流大約為llOmA,當僅使用發光二極管時,電流約為30mA。
電阻R。的值必須與要求的引擎速度適配,阻值為18kQ時,發動機的速度能通過Pl設置為2000~7800r/min。
用下式計算出引擎的轉速:
其中,以為轉速;cil為引擎缸數;m為2(2沖程的引擎)或者4(4沖程的引擎).為點火脈沖頻率。根據式(3.1)和式(3.2),可以得到R。和Pl的值。
電路的校準可以便用一臺數字頻率計和一臺脈沖信號發生器,調節脈沖頻率為設定轉速的對應頻率,調節P.使發光二極管發光即可。
 相關技術資料
相關技術資料- 9-4引擎速度監視器電路

 公網安備44030402000607
公網安備44030402000607





