
不等位電勢的補償
發布時間:2014/11/28 21:45:59 訪問次數:3539
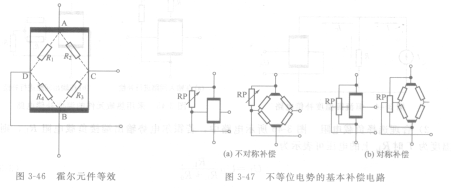
在分析不等位電勢時,STB12NK80Z-S可將霍爾元件等效為一個電橋,如圖3-46所示。控制電極A、B和霍爾電極C、D可看作電橋的電阻連接點,它們之間的分布電阻Ri、R2、R.3、R4構成四個橋臂,控制電壓可視為電橋的工作電壓。理想情況下不等位電勢UM=0,對應于電橋的平衡狀態,此時,Ri =R2 =R3 =R4。如果霍爾元件因某種結構原因造成電勢UM≠0,則電橋就處于不平衡狀態,此時Ri、Rz、R3、R4的阻值有差異,UM就是電橋的不平衡輸出電
壓。既然產生UM的原因可歸結為等效電橋四個橋臂上的電阻不相等,那么任何能夠使電橋達到平衡的方法都可作為不等位電勢的補償方法。
基本補償電路霍爾元件的不等位電勢補償電路有多種形式,圖3-47為兩種常見電路,其中RP是調節電阻。圖3-47(a)是在電橋不平衡的電阻值較大的一個橋臂上并聯RP,通過調節RP使電橋達到平衡狀態,稱為不對稱補償電路;圖3-47(b)則相當于在兩個電橋
臂上并聯調節電阻,稱為對稱補償電路。
基本補償電路中沒有考慮溫度變化的影響。實際上,由于調節電阻RP與霍爾元件的等效橋臂上的電阻溫度系數一般都不相同,所以在某一溫度下通過調節RP使UM=0,當溫度發生變化時平衡又被破壞了,這時又需重新進行平衡調節。事實上,圖3-47 (b)電路的溫度穩定性比圖3-47(a)電路要好一些。
在分析不等位電勢時,STB12NK80Z-S可將霍爾元件等效為一個電橋,如圖3-46所示。控制電極A、B和霍爾電極C、D可看作電橋的電阻連接點,它們之間的分布電阻Ri、R2、R.3、R4構成四個橋臂,控制電壓可視為電橋的工作電壓。理想情況下不等位電勢UM=0,對應于電橋的平衡狀態,此時,Ri =R2 =R3 =R4。如果霍爾元件因某種結構原因造成電勢UM≠0,則電橋就處于不平衡狀態,此時Ri、Rz、R3、R4的阻值有差異,UM就是電橋的不平衡輸出電
壓。既然產生UM的原因可歸結為等效電橋四個橋臂上的電阻不相等,那么任何能夠使電橋達到平衡的方法都可作為不等位電勢的補償方法。
基本補償電路霍爾元件的不等位電勢補償電路有多種形式,圖3-47為兩種常見電路,其中RP是調節電阻。圖3-47(a)是在電橋不平衡的電阻值較大的一個橋臂上并聯RP,通過調節RP使電橋達到平衡狀態,稱為不對稱補償電路;圖3-47(b)則相當于在兩個電橋
臂上并聯調節電阻,稱為對稱補償電路。
基本補償電路中沒有考慮溫度變化的影響。實際上,由于調節電阻RP與霍爾元件的等效橋臂上的電阻溫度系數一般都不相同,所以在某一溫度下通過調節RP使UM=0,當溫度發生變化時平衡又被破壞了,這時又需重新進行平衡調節。事實上,圖3-47 (b)電路的溫度穩定性比圖3-47(a)電路要好一些。
 相關技術資料
相關技術資料- 11-28不等位電勢的補償
熱門點擊
- 電容電場的邊緣效應
- 超聲波發生器和接收器原理
- 因特網交換點IXP的主要作用
- 不等位電勢的補償
- 常用的熱電阻傳感器測量電路
- 熱敏電阻輸出特性的線性化處理
- 應用電路光電池轉換電路
- 公鑰密碼體制的產生主要是因為兩個方面的原因
- 網絡核心部分是因特網中最復雜的部分
- LabVIEW子VI需要接入的數據類型是數組
推薦技術資料

- 泰克新發布的DSA830
- 泰克新發布的DSA8300在一臺儀器中同時實現時域和頻域分析,DS... [詳細]
 公網安備44030402000607
公網安備44030402000607





