
大量程激光小角度測量原理
發布時間:2015/5/22 18:07:46 訪問次數:1420
為了提高裝置的靈敏度,還可在對EP1C4F324C7徑位置上布置兩個角錐棱鏡,如圖2 -7所示。在這種情況下,干涉儀經過兩次光倍頻,使得每一條干涉帶相應的程差變為A/8,同時由于可逆記錄器才用了四倍頻,使得每記一個數對應長度為A/32。若計數器所計數目為K,
若R為常數,便可按“= arcsinH/R求得d角。儀器的測量范圍為±5。,在±1。內儀器的最大誤差為±0. 05s。
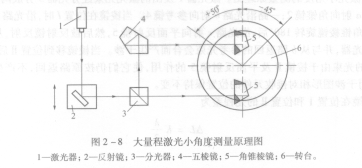
為了擴大小角度干涉儀的量程,可采用如圖2-8所示的裝置,由激光器1發出的激光光束經移動式轉向反射鏡2反射至分光器3,此時激光器被分成兩束,一束經過分光器3,一束經過五棱鏡4轉向,其后兩束平行光束分別射向兩個角錐棱鏡5,之后又匯合于分
光器產生干涉。角錐棱鏡被固定于轉臺6上,它的旋轉改變了上兩束光的程差。這種裝置的測量范圍可達95 0,精確度可達±0. 3s。
圖2-8 大量程激光小角度測量原理圖
1-激光器;2一反射鏡;3-分光器;4-五棱鏡;5-角錐棱鏡;6-轉臺
為了提高裝置的靈敏度,還可在對EP1C4F324C7徑位置上布置兩個角錐棱鏡,如圖2 -7所示。在這種情況下,干涉儀經過兩次光倍頻,使得每一條干涉帶相應的程差變為A/8,同時由于可逆記錄器才用了四倍頻,使得每記一個數對應長度為A/32。若計數器所計數目為K,
若R為常數,便可按“= arcsinH/R求得d角。儀器的測量范圍為±5。,在±1。內儀器的最大誤差為±0. 05s。
為了擴大小角度干涉儀的量程,可采用如圖2-8所示的裝置,由激光器1發出的激光光束經移動式轉向反射鏡2反射至分光器3,此時激光器被分成兩束,一束經過分光器3,一束經過五棱鏡4轉向,其后兩束平行光束分別射向兩個角錐棱鏡5,之后又匯合于分
光器產生干涉。角錐棱鏡被固定于轉臺6上,它的旋轉改變了上兩束光的程差。這種裝置的測量范圍可達95 0,精確度可達±0. 3s。
圖2-8 大量程激光小角度測量原理圖
1-激光器;2一反射鏡;3-分光器;4-五棱鏡;5-角錐棱鏡;6-轉臺
 相關技術資料
相關技術資料- 5-22大量程激光小角度測量原理

 公網安備44030402000607
公網安備44030402000607





