
UCC283TDKTTT-3G3 自動飛行控制系統的內回路
發布時間:2019/12/26 13:24:17 訪問次數:2102
UCC283TDKTTT-3G3因此,飛行管理系統為駕駛員提供了四維導航計算,如圖8,6-1所示。

起飛機場準爬升最佳速度和高度(巡航),L_NAV航路點下降航路目的地機場外信標,飛行管理系統的主要功能.
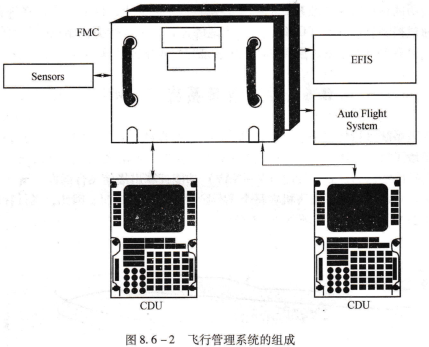
FMS有一臺或兩臺飛行管理計算機(FMC),它通過兩個控制板和兩個控制顯示組件(CDU)與駕駛員進行溝通。對于長距離飛行的飛機,常常還需要第三臺CDU作為各用。FMs向EFIs提供的計算數據用于顯示,向自動飛行控制系統提供的數據用于自動控制。當然,FMS本身也需要許多傳感器作為其輸入信號,如圖8,6-2所示。
橫向導航,飛行管理計算機(FMC)可以分成兩個部分:一部分是計算橫向導航數據的導航計算機,另一部分是計算垂直導航數據和時間的性能計算機,如圖8.6-3所示。
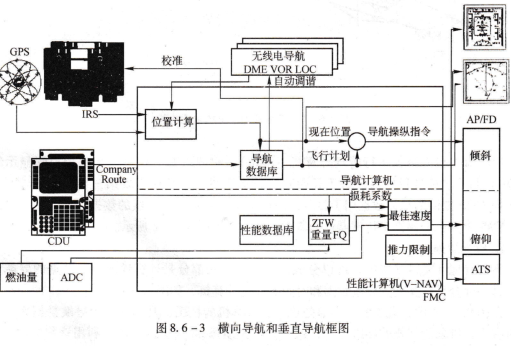
在圖8.6-3中,虛線的上半部分是導航計算機的框圖,其中有一個導航數據庫,它存儲所有飛行階段所需要的導航數據,這一數據必須每28天更新一次。利用該數據庫,FMC可以通過給定的飛機位置和輸人的飛行航路建立飛行計劃。航空公司航路必須由駕駛員在控制顯式組件(CDU)上輸人。
在飛機飛行過程中,將飛行計劃中標出的位置與飛機的現時位置進行比較。這一比較結果是一個位置誤差,它被送到自動駕駛儀和飛行指引的橫滾計算機中進行計算,輸出操縱指令信號。自動飛行控制系統的內回路利用這一信號指示出飛機向左或向右。飛行管理計算機利用差值傳感器中的信號計算出飛機現時的位置。這些差值傳感器就是全球定位系統(GPS)和慣性基準系統(IRS)。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
UCC283TDKTTT-3G3因此,飛行管理系統為駕駛員提供了四維導航計算,如圖8,6-1所示。
起飛機場準爬升最佳速度和高度(巡航),L_NAV航路點下降航路目的地機場外信標,飛行管理系統的主要功能.
FMS有一臺或兩臺飛行管理計算機(FMC),它通過兩個控制板和兩個控制顯示組件(CDU)與駕駛員進行溝通。對于長距離飛行的飛機,常常還需要第三臺CDU作為各用。FMs向EFIs提供的計算數據用于顯示,向自動飛行控制系統提供的數據用于自動控制。當然,FMS本身也需要許多傳感器作為其輸入信號,如圖8,6-2所示。
橫向導航,飛行管理計算機(FMC)可以分成兩個部分:一部分是計算橫向導航數據的導航計算機,另一部分是計算垂直導航數據和時間的性能計算機,如圖8.6-3所示。
在圖8.6-3中,虛線的上半部分是導航計算機的框圖,其中有一個導航數據庫,它存儲所有飛行階段所需要的導航數據,這一數據必須每28天更新一次。利用該數據庫,FMC可以通過給定的飛機位置和輸人的飛行航路建立飛行計劃。航空公司航路必須由駕駛員在控制顯式組件(CDU)上輸人。
在飛機飛行過程中,將飛行計劃中標出的位置與飛機的現時位置進行比較。這一比較結果是一個位置誤差,它被送到自動駕駛儀和飛行指引的橫滾計算機中進行計算,輸出操縱指令信號。自動飛行控制系統的內回路利用這一信號指示出飛機向左或向右。飛行管理計算機利用差值傳感器中的信號計算出飛機現時的位置。這些差值傳感器就是全球定位系統(GPS)和慣性基準系統(IRS)。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
 相關技術資料
相關技術資料- 11-28最新集成傳感激光測距模塊規格參數技術應用
- 11-28Supermicro NVIDIA HGX B200系統參數應用設
- 11-28新一代 ToF 激光測距傳感器詳細探討
- 11-28全新 Riedon™ 功率電阻產品系列
- 11-28分流電阻的檢測原理及市場格局
- 11-28前沿技術AI輔助診斷應用新進展
- 11-2712位模數轉換器 (ADC)參數特點技術封裝
- 11-27三角函數加速器 (TMU)系列
- 11-27單芯片“艙行泊”一體化方案探究
- 11-27CoolSiC肖特基二極管技術參數應用設計
- 11-27納微GaN Safe系列NV6515(650V,32mΩ max)IC
- 11-27臨界導通模式(CrM)詳情
 公網安備44030402000607
公網安備44030402000607





