
UC3901J 驅動輸出的電流調節和衰減方式調節
發布時間:2020/3/2 19:02:56 訪問次數:2380
UC3901J芯片的邏輯電源為5 V,VDD端口為邏輯電源引腳,設計時也要接入電容來減小干擾噪聲;ALERT為過流保護輸出端;RESET為芯片復位腳,低電平有效;OSC1A、OSC1B端口所接電容的大小決定了斬波器頻率,推薦接入100~1 000 pF的電容,此時的斬波頻率為400~44 kHz;M1、M2、M3端口分別為步進電機驅動的細分設置引腳,用外接撥碼開關可設定不同的細分值,例如整步、1/2步、1/4步、1/8步等,最高可達64細分。步進電機在低頻工作時,伴有較大的振動和較大的噪聲,通過細分驅動來解決。驅動輸出的電流調節和衰減方式調節都可通過外接撥碼開關.

MC33991是單獨封裝,通過SPI (串行外設接口)進行通信,可同時控制2個步進電機的驅動電路。該電路也可以仿照氣隙磁通的運動,把普通電機轉化為步進電機來控制。它有以下主要特點:
有4 096個靜態指示位置,接收位置命令后驅動指針指示。
最大指針掃過范圍340度;最大指針速度為400 deg/s;最大指針加速度為4 500 deg/s.
應用微步距控制技術(每步細分為12個微步)。
指針回零校準,能準確地回零。
16位SPI ( Serial Peripheral Interface) ,通信占用較少的I /O口。
內部時鐘校準功能;睡眠模式下的耗電量較小。
工作溫度- 40~125℃;供電電壓范圍6.5~26 V。
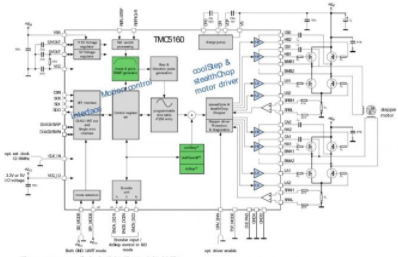
每個電機帶一個ABN編碼器接口和兩個參考開關。如果運動電機不需要實時任務,可用一個CPU控制整個系統。CPU板和控制器/驅動器板之間的連接經濟且節省空間。
TMC5160運動控制和驅動芯片是CPU和大功率步進電機之間的智能功率接口器件。所有步進電機邏輯完全在TMC5160內,不需要軟件來控制電機——只需提供目標位置。TMC5160提供了許多獨特的增強功能,這些功能通過集成的控制驅動器得以實現。TMC5160的六點斜坡發生器自動使用stealthChop、dcStep、coolStep和stallGuard2,來優化每個電機的運動。TMC5160將TMC2100、TMC2130和TMC5130系列擴展到更高的電壓和更高的電機電流。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
(素材來源:21IC.如涉版權請聯系刪除。特別感謝)
UC3901J芯片的邏輯電源為5 V,VDD端口為邏輯電源引腳,設計時也要接入電容來減小干擾噪聲;ALERT為過流保護輸出端;RESET為芯片復位腳,低電平有效;OSC1A、OSC1B端口所接電容的大小決定了斬波器頻率,推薦接入100~1 000 pF的電容,此時的斬波頻率為400~44 kHz;M1、M2、M3端口分別為步進電機驅動的細分設置引腳,用外接撥碼開關可設定不同的細分值,例如整步、1/2步、1/4步、1/8步等,最高可達64細分。步進電機在低頻工作時,伴有較大的振動和較大的噪聲,通過細分驅動來解決。驅動輸出的電流調節和衰減方式調節都可通過外接撥碼開關.
MC33991是單獨封裝,通過SPI (串行外設接口)進行通信,可同時控制2個步進電機的驅動電路。該電路也可以仿照氣隙磁通的運動,把普通電機轉化為步進電機來控制。它有以下主要特點:
有4 096個靜態指示位置,接收位置命令后驅動指針指示。
最大指針掃過范圍340度;最大指針速度為400 deg/s;最大指針加速度為4 500 deg/s.
應用微步距控制技術(每步細分為12個微步)。
指針回零校準,能準確地回零。
16位SPI ( Serial Peripheral Interface) ,通信占用較少的I /O口。
內部時鐘校準功能;睡眠模式下的耗電量較小。
工作溫度- 40~125℃;供電電壓范圍6.5~26 V。
每個電機帶一個ABN編碼器接口和兩個參考開關。如果運動電機不需要實時任務,可用一個CPU控制整個系統。CPU板和控制器/驅動器板之間的連接經濟且節省空間。
TMC5160運動控制和驅動芯片是CPU和大功率步進電機之間的智能功率接口器件。所有步進電機邏輯完全在TMC5160內,不需要軟件來控制電機——只需提供目標位置。TMC5160提供了許多獨特的增強功能,這些功能通過集成的控制驅動器得以實現。TMC5160的六點斜坡發生器自動使用stealthChop、dcStep、coolStep和stallGuard2,來優化每個電機的運動。TMC5160將TMC2100、TMC2130和TMC5130系列擴展到更高的電壓和更高的電機電流。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
(素材來源:21IC.如涉版權請聯系刪除。特別感謝)
 相關技術資料
相關技術資料- 11-23模擬和混合信號平臺Treo詳情
- 11-23PXI和LXI模塊化解決方案解讀
- 11-23AN-13-0004_CAN收發器結構參數特點應用設計
- 11-23屏蔽柵槽溝技術 (SGT)主要特性及功能應用
- 11-23第一代SGT MOSFET系列技術結構參數封裝
- 11-23全球首顆GSE DPU芯片發布
- 11-22新一代5G-A模組RG650V-NA結構技術參數應用及需求分析
- 11-22電池儲能系統 (BESS)結構設計及解決方案
- 11-22全新高脈沖制動電阻系列參數技術應用設計
- 11-22Telcordia GR-468 CORE測試應用全
- 11-22DSP(數字信號處理器)系列介紹
- 11-22AI ISP的技術優勢和市場發展趨勢

 公網安備44030402000607
公網安備44030402000607





