
SN104607FNHR 氣動載荷損傷襟翼
發布時間:2019/12/19 12:36:53 訪問次數:931
SN104607FNHR圖5.5-12所示為飛機襟翼操縱系統原理圖。當正常操縱時,襟翼控制手柄向后扳動,通過傳動鋼索、扇形輪和傳動桿等機構,操縱襟翼控制活門偏離中立位置,將系統液壓引到液壓馬達。
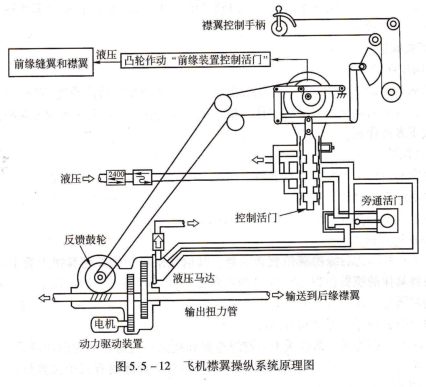
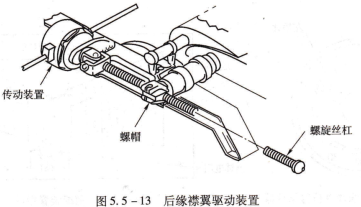
液壓馬達轉動,通過扭力管向襟翼傳遞扭矩。轉換機構將沿翼展方向的轉動信號轉換為沿飛機縱軸方向的轉動信號,通過絲桿螺帽,再將轉動信號轉換為沿縱軸向后的運動,從而推動后緣襟翼放出(襟翼驅動裝置見圖5.5-13)。
襟翼控制手柄,液壓馬達.輸送到后緣襟翼.輸出扭力管,動力驅動裝置.
飛機襟翼操縱系統原理圖,傳動裝置,螺帽螺旋絲杠.
后緣襟翼驅動裝置,在輸出扭力管轉動的同時,反饋鼓輪將扭力管的輸出信號反饋到輸入端的凸輪。其中一個凸輪通過傳動桿,作動襟翼控制活門向中立方向運動。當后緣襟翼到達預定位置后,襟翼控制活門返回中立位置,供往液壓馬達的油液被切斷,液壓馬達停止轉動,操縱過程結束。此時,后緣襟翼停在預定位置。
反饋鼓輪的反饋信號通過反饋鋼索,同時帶動另一個凸輪,該凸輪可作動前緣裝置的控制活門。前緣裝置控制活門可將液壓引到前緣裝置作動筒,從而使前緣襟翼和縫翼放出。由以上控制可看出,前緣裝置的位置是由后緣襟翼位置所決定的。
前緣縫翼和襟翼,控制活門.當采用備用方式工作時,應通過備用襟翼電門操縱襟翼收放。首先,應使旁通活門處在旁通位,防止在傳動過程中液壓馬達產生液壓鎖緊,該操作通過將各有襟翼電門操縱到“ARM”位實現;然后,操縱各用機翼電門到“DOWN”位,電機轉動,驅動輸出扭力管轉動,從而驅動襟翼放下。
襟翼保護,不同步保護,由于后緣襟翼放出的角度大,如果放出時左、右兩側襟翼放出角度不同,出現不同步,則襟翼操縱系統會自動切斷襟翼的工作,防止不同步的進一步擴大。不同步保護一般僅在正常工作方式下發揮作用。
過載保護,在襟翼驅動機構中設置了襟翼載荷限制器,用于保護襟翼結構,防止過大的氣動載荷損傷襟翼。當后緣襟翼處于完全放出位置時,如果某時刻的空速突然超過預定值,后緣襟翼會自動收進一個稍小的角度,防止襟翼結構承受過大的氣動載荷。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
SN104607FNHR圖5.5-12所示為飛機襟翼操縱系統原理圖。當正常操縱時,襟翼控制手柄向后扳動,通過傳動鋼索、扇形輪和傳動桿等機構,操縱襟翼控制活門偏離中立位置,將系統液壓引到液壓馬達。
液壓馬達轉動,通過扭力管向襟翼傳遞扭矩。轉換機構將沿翼展方向的轉動信號轉換為沿飛機縱軸方向的轉動信號,通過絲桿螺帽,再將轉動信號轉換為沿縱軸向后的運動,從而推動后緣襟翼放出(襟翼驅動裝置見圖5.5-13)。
襟翼控制手柄,液壓馬達.輸送到后緣襟翼.輸出扭力管,動力驅動裝置.
飛機襟翼操縱系統原理圖,傳動裝置,螺帽螺旋絲杠.
后緣襟翼驅動裝置,在輸出扭力管轉動的同時,反饋鼓輪將扭力管的輸出信號反饋到輸入端的凸輪。其中一個凸輪通過傳動桿,作動襟翼控制活門向中立方向運動。當后緣襟翼到達預定位置后,襟翼控制活門返回中立位置,供往液壓馬達的油液被切斷,液壓馬達停止轉動,操縱過程結束。此時,后緣襟翼停在預定位置。
反饋鼓輪的反饋信號通過反饋鋼索,同時帶動另一個凸輪,該凸輪可作動前緣裝置的控制活門。前緣裝置控制活門可將液壓引到前緣裝置作動筒,從而使前緣襟翼和縫翼放出。由以上控制可看出,前緣裝置的位置是由后緣襟翼位置所決定的。
前緣縫翼和襟翼,控制活門.當采用備用方式工作時,應通過備用襟翼電門操縱襟翼收放。首先,應使旁通活門處在旁通位,防止在傳動過程中液壓馬達產生液壓鎖緊,該操作通過將各有襟翼電門操縱到“ARM”位實現;然后,操縱各用機翼電門到“DOWN”位,電機轉動,驅動輸出扭力管轉動,從而驅動襟翼放下。
襟翼保護,不同步保護,由于后緣襟翼放出的角度大,如果放出時左、右兩側襟翼放出角度不同,出現不同步,則襟翼操縱系統會自動切斷襟翼的工作,防止不同步的進一步擴大。不同步保護一般僅在正常工作方式下發揮作用。
過載保護,在襟翼驅動機構中設置了襟翼載荷限制器,用于保護襟翼結構,防止過大的氣動載荷損傷襟翼。當后緣襟翼處于完全放出位置時,如果某時刻的空速突然超過預定值,后緣襟翼會自動收進一個稍小的角度,防止襟翼結構承受過大的氣動載荷。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
 相關技術資料
相關技術資料- 11-28最新集成傳感激光測距模塊規格參數技術應用
- 11-28Supermicro NVIDIA HGX B200系統參數應用設
- 11-28新一代 ToF 激光測距傳感器詳細探討
- 11-28全新 Riedon™ 功率電阻產品系列
- 11-28分流電阻的檢測原理及市場格局
- 11-28前沿技術AI輔助診斷應用新進展
- 11-2712位模數轉換器 (ADC)參數特點技術封裝
- 11-27三角函數加速器 (TMU)系列
- 11-27單芯片“艙行泊”一體化方案探究
- 11-27CoolSiC肖特基二極管技術參數應用設計
- 11-27納微GaN Safe系列NV6515(650V,32mΩ max)IC
- 11-27臨界導通模式(CrM)詳情

 公網安備44030402000607
公網安備44030402000607





